 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data Driven Method of Optimizing Feedforward Compensator for Autonomous Vehicle
Paper and Code
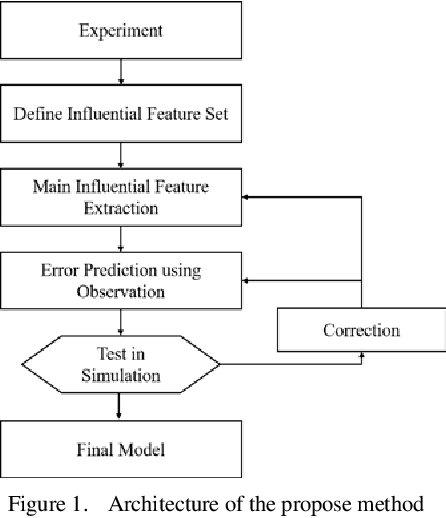
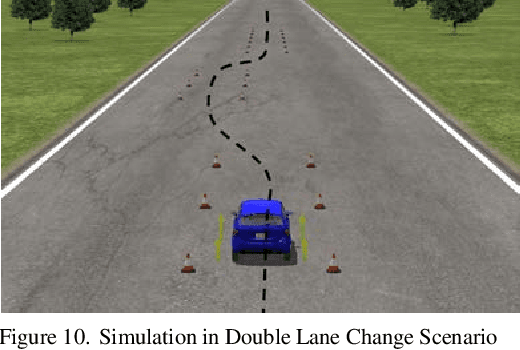
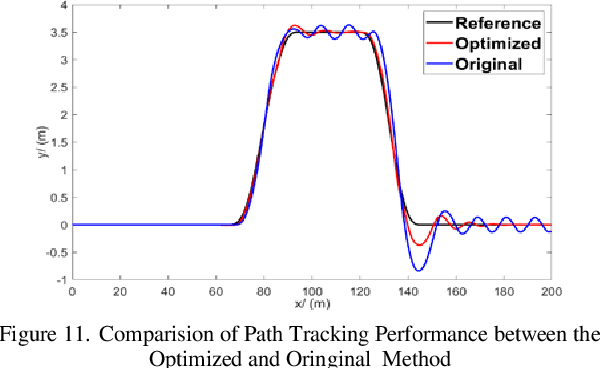
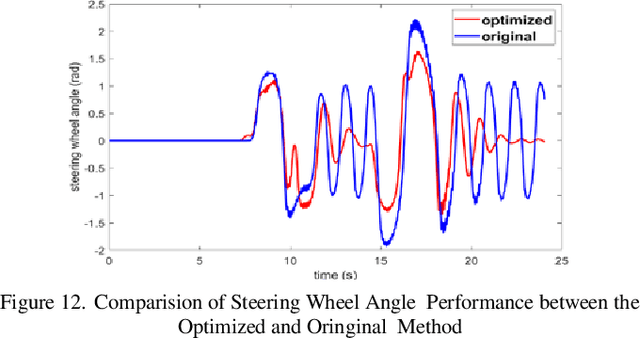
A reliable controller is critical and essential for the execution of safe and smooth maneuvers of an autonomous vehicle.The controller must be robust to external disturbances, such as road surface, weather, and wind conditions, and so on.It also needs to deal with the internal parametric variations of vehicle sub-systems, including power-train efficiency, measurement errors, time delay,so on.Moreover, as in most production vehicles, the low-control commands for the engine, brake, and steering systems are delivered through separate electronic control units.These aforementioned factors introduce opaque and ineffectiveness issues in controller performance.In this paper, we design a feed-forward compensate process via a data-driven method to model and further optimize the controller performance.We apply the principal component analysis to the extraction of most influential features.Subsequently,we adopt a time delay neural network and include the accuracy of the predicted error in a future time horizon.Utilizing the predicted error,we then design a feed-forward compensate process to improve the control performance.Finally,we demonstrate the effectiveness of the proposed feed-forward compensate process in simulation scenarios.