 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariant Feature Mappings for Generalizing Affordance Understanding Using Regularized Metric Learning
Paper and Code
Jan 30, 2019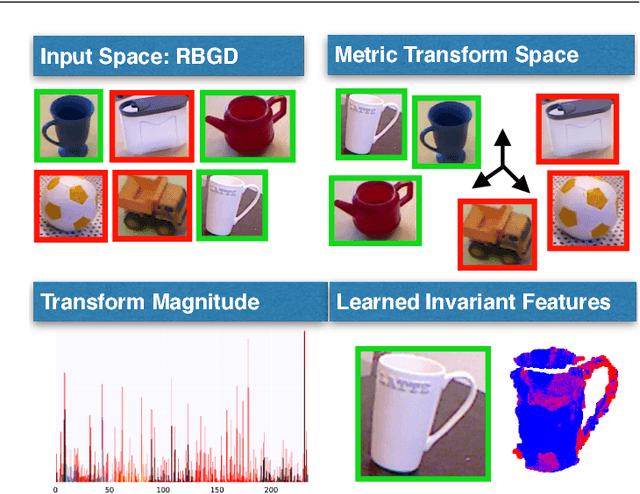
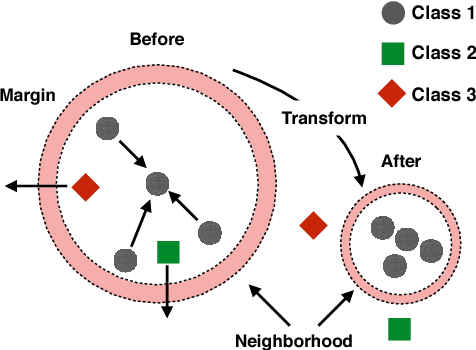
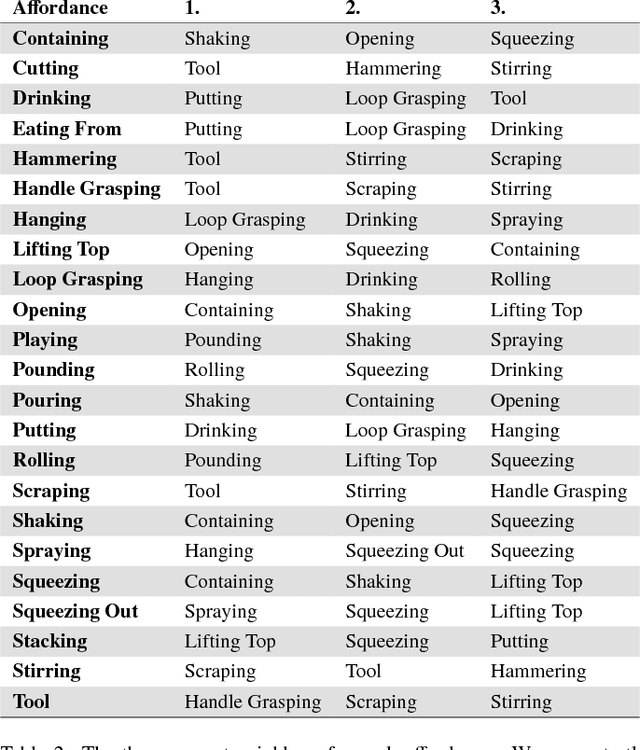
This paper presents an approach for learning invariant features for object affordance understanding. One of the major problems for a robotic agent acquiring a deeper understanding of affordances is finding sensory-grounded semantics. Being able to understand what in the representation of an object makes the object afford an action opens up for more efficient manipulation, interchange of objects that visually might not be similar, transfer learning, and robot to human communication. Our approach uses a metric learning algorithm that learns a feature transform that encourages objects that affords the same action to be close in the feature space. We regularize the learning, such that we penalize irrelevant features, allowing the agent to link what in the sensory input caused the object to afford the action. From this, we show how the agent can abstract the affordance and reason about the similarity between different affordances.