 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobustness to Out-of-Distribution Inputs via Task-Aware Generative Uncertainty
Paper and Code
Dec 27, 2018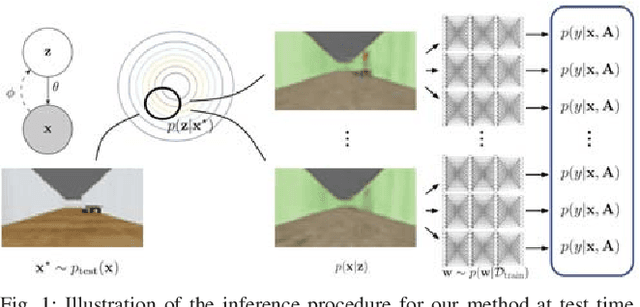
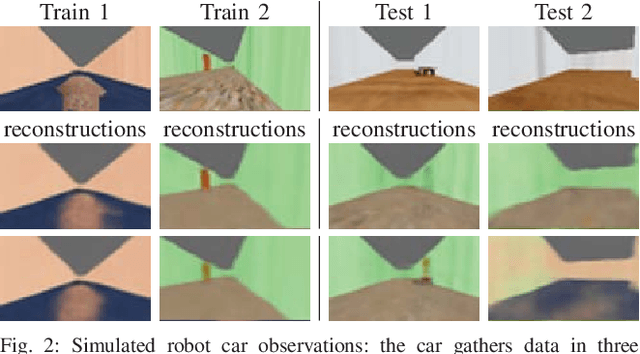
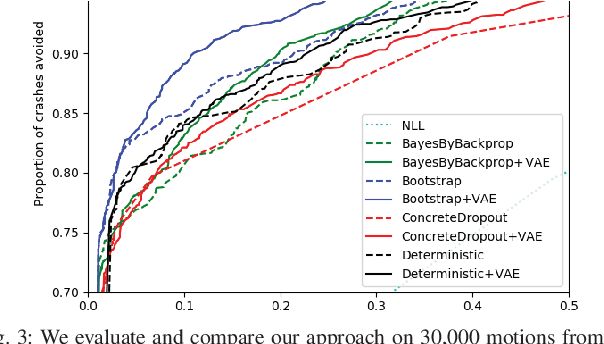
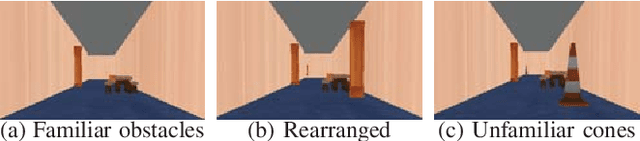
Deep learning provides a powerful tool for machine perception when the observations resemble the training data. However, real-world robotic systems must react intelligently to their observations even in unexpected circumstances. This requires a system to reason about its own uncertainty given unfamiliar, out-of-distribution observations. Approximate Bayesian approaches are commonly used to estimate uncertainty for neural network predictions, but can struggle with out-of-distribution observations. Generative models can in principle detect out-of-distribution observations as those with a low estimated density. However, the mere presence of an out-of-distribution input does not by itself indicate an unsafe situation. In this paper, we present a method for uncertainty-aware robotic perception that combines generative modeling and model uncertainty to cope with uncertainty stemming from out-of-distribution states. Our method estimates an uncertainty measure about the model's prediction, taking into account an explicit (generative) model of the observation distribution to handle out-of-distribution inputs. This is accomplished by probabilistically projecting observations onto the training distribution, such that out-of-distribution inputs map to uncertain in-distribution observations, which in turn produce uncertain task-related predictions, but only if task-relevant parts of the image change. We evaluate our method on an action-conditioned collision prediction task with both simulated and real data, and demonstrate that our method of projecting out-of-distribution observations improves the performance of four standard Bayesian and non-Bayesian neural network approaches, offering more favorable trade-offs between the proportion of time a robot can remain autonomous and the proportion of impending crashes successfully avoided.