 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Continuity of Rotation Representations in Neural Networks
Paper and Code
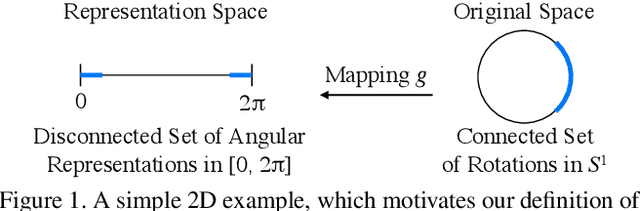

In neural networks, it is often desirable to work with various representations of the same space. For example, 3D rotations can be represented with quaternions or Euler angles. In this paper, we advance a definition of a continuous representation, which can be helpful for training deep neural network. We relate this to the definition of topological equivalence. We then investigate what are continuous and discontinuous representations for 2D, 3D, and n-dimensional rotations. We demonstrate that for 3D rotations, all representations are discontinuous in four or fewer dimensions in real Euclidean space. Thus, widely used representations such as quaternions and Euler angles are discontinuous and difficult for neural networks to learn. We show that the 3D rotations have continuous representations in 5D and 6D which are more suitable for learning. We also present continuous representations for the general case of the n dimensional rotation group SO(n). While our main focus is on rotations, we also show that our constructions apply to other groups such as the orthogonal group and similarity transforms. We finally present empirical results, which show that our continuous rotation representations outperform discontinuous ones for several practical problems in graphics and vision, including a simple autoencoder sanity test, a rotation estimator for 3D point clouds, and an inverse kinematics solver for 3D human poses.