 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompositional Imitation Learning: Explaining and executing one task at a time
Paper and Code
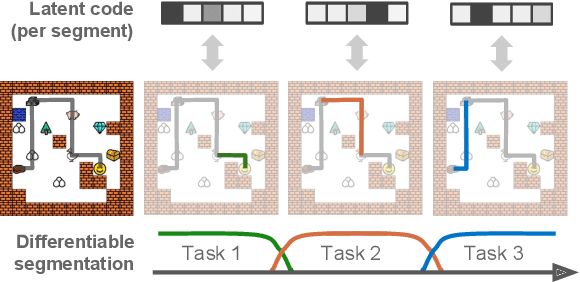
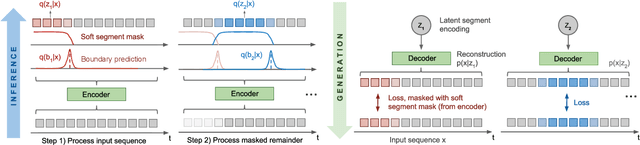
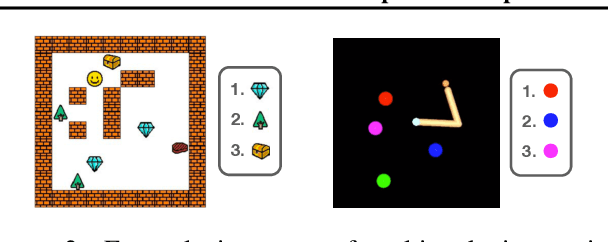
We introduce a framework for Compositional Imitation Learning and Execution (CompILE) of hierarchically-structured behavior. CompILE learns reusable, variable-length segments of behavior from demonstration data using a novel unsupervised, fully-differentiable sequence segmentation module. These learned behaviors can then be re-composed and executed to perform new tasks. At training time, CompILE auto-encodes observed behavior into a sequence of latent codes, each corresponding to a variable-length segment in the input sequence. Once trained, our model generalizes to sequences of longer length and from environment instances not seen during training. We evaluate our model in a challenging 2D multi-task environment and show that CompILE can find correct task boundaries and event encodings in an unsupervised manner without requiring annotated demonstration data. Latent codes and associated behavior policies discovered by CompILE can be used by a hierarchical agent, where the high-level policy selects actions in the latent code space, and the low-level, task-specific policies are simply the learned decoders. We found that our agent could learn given only sparse rewards, where agents without task-specific policies struggle.