 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Trajectory Optimization using a Roadmap Framework
Paper and Code
Nov 05, 2018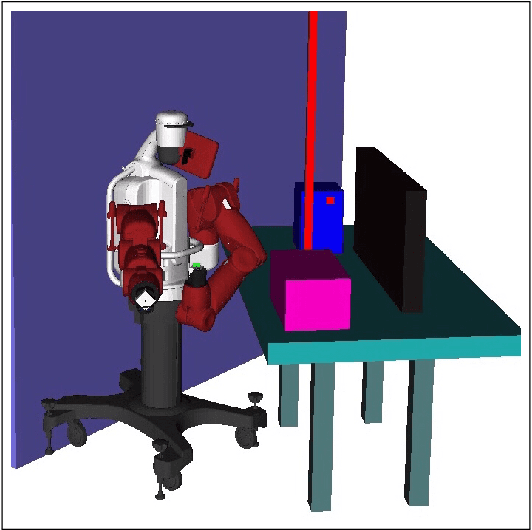
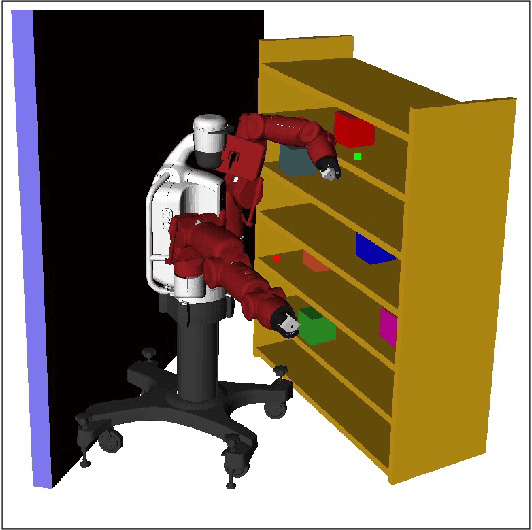
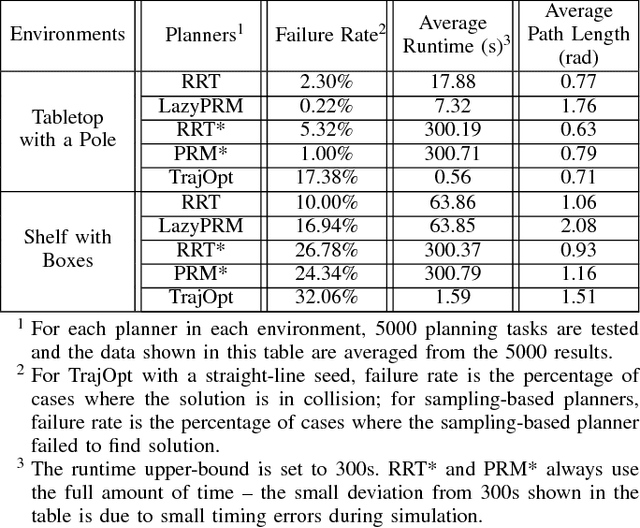
We present an evaluation of several representative sampling-based and optimization-based motion planners, and then introduce an integrated motion planning system which incorporates recent advances in trajectory optimization into a sparse roadmap framework. Through experiments in 4 common application scenarios with 5000 test cases each, we show that optimization-based or sampling-based planners alone are not effective for realistic problems where fast planning times are required. To the best of our knowledge, this is the first work that presents such a systematic and comprehensive evaluation of state-of-the-art motion planners, which are based on a significant amount of experiments. We then combine different stand-alone planners with trajectory optimization. The results show that the combination of our sparse roadmap and trajectory optimization provides superior performance over other standard sampling-based planners combinations. By using a multi-query roadmap instead of generating completely new trajectories for each planning problem, our approach allows for extensions such as persistent control policy information associated with a trajectory across planning problems. Also, the sub-optimality resulting from the sparsity of roadmap, as well as the unexpected disturbances from the environment, can both be overcome by the real-time trajectory optimization process.