Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstablishing Appropriate Trust via Critical States
Paper and Code
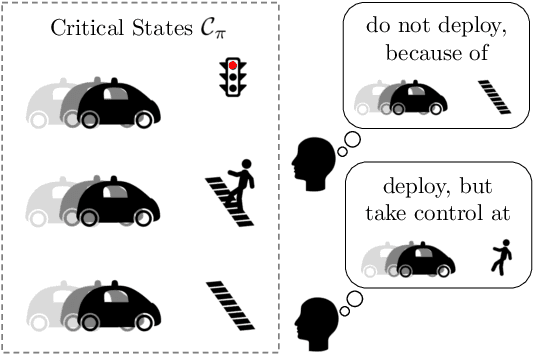
In order to effectively interact with or supervise a robot, humans need to have an accurate mental model of its capabilities and how it acts. Learned neural network policies make that particularly challenging. We propose an approach for helping end-users build a mental model of such policies. Our key observation is that for most tasks, the essence of the policy is captured in a few critical states: states in which it is very important to take a certain action. Our user studies show that if the robot shows a human what its understanding of the task's critical states is, then the human can make a more informed decision about whether to deploy the policy, and if she does deploy it, when she needs to take control from it at execution time.
* IROS 2018
View paper on