 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpressing Robot Incapability
Paper and Code
Oct 18, 2018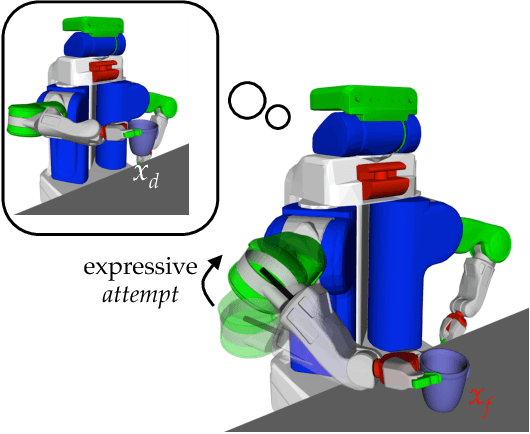
Our goal is to enable robots to express their incapability, and to do so in a way that communicates both what they are trying to accomplish and why they are unable to accomplish it. We frame this as a trajectory optimization problem: maximize the similarity between the motion expressing incapability and what would amount to successful task execution, while obeying the physical limits of the robot. We introduce and evaluate candidate similarity measures, and show that one in particular generalizes to a range of tasks, while producing expressive motions that are tailored to each task. Our user study supports that our approach automatically generates motions expressing incapability that communicate both what and why to end-users, and improve their overall perception of the robot and willingness to collaborate with it in the future.