 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmarking of DCM Based Architectures for Position and Velocity Controlled Walking of Humanoid Robots
Paper and Code
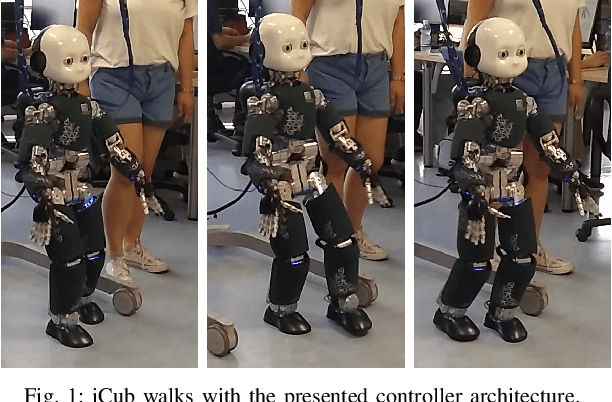
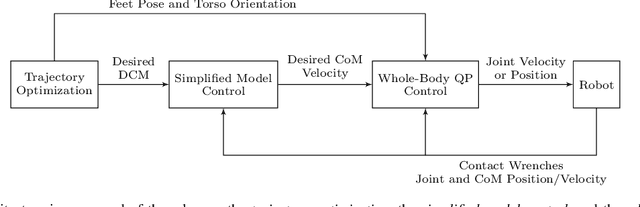
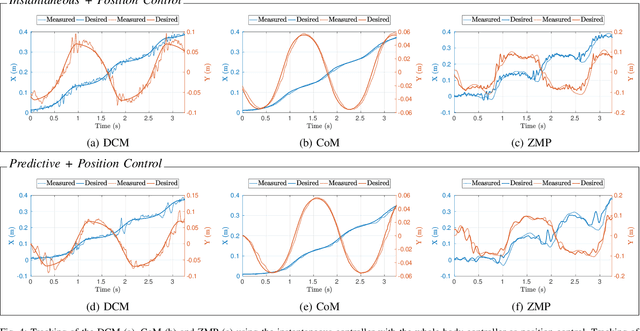
This paper contributes towards the development and comparison of Divergent-Component-of-Motion (DCM) based control architectures for humanoid robot locomotion. More precisely, we present and compare several DCM based implementations of a three layer control architecture. From top to bottom, these three layers are here called: trajectory optimization, simplified model control, and whole-body QP control. All layers use the DCM concept to generate references for the layer below. For the simplified model control layer, we present and compare both instantaneous and Receding Horizon Control controllers. For the whole-body QP control layer, we present and compare controllers for position and velocity control robots. Experimental results are carried out on the one-meter tall iCub humanoid robot. We show which implementation of the above control architecture allows the robot to achieve a walking velocity of 0.41 meters per second.