 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Method for Extrinsic Calibration of Multiple RGB-D Cameras Using Descriptor-Based Patterns
Paper and Code
Sep 10, 2018

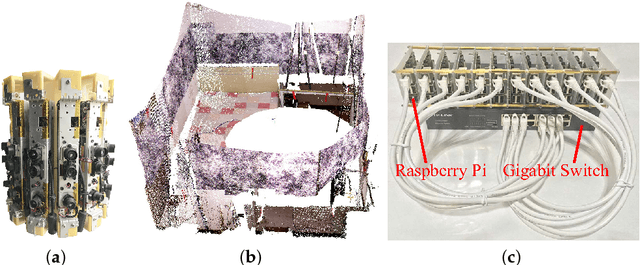

This letter presents a novel method to estimate the relative poses between RGB-D cameras with minimal overlapping fields of view in a panoramic RGB-D camera system. This calibration problem is relevant to applications such as indoor 3D mapping and robot navigation that can benefit from a 360$^\circ$ field of view using RGB-D cameras. The proposed approach relies on descriptor-based patterns to provide well-matched 2D keypoints in the case of a minimal overlapping field of view between cameras. Integrating the matched 2D keypoints with corresponding depth values, a set of 3D matched keypoints are constructed to calibrate multiple RGB-D cameras. Experiments validated the accuracy and efficiency of the proposed calibration approach, both superior to those of existing methods (800 ms vs. 5 seconds; rotation error of 0.56 degrees vs. 1.6 degrees; and translation error of 1.80 cm vs. 2.5 cm.