 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Design of Task-specific Robotic Arms
Paper and Code
Jun 19, 2018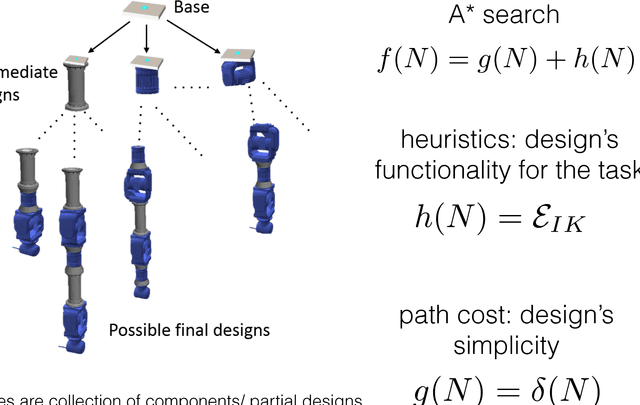
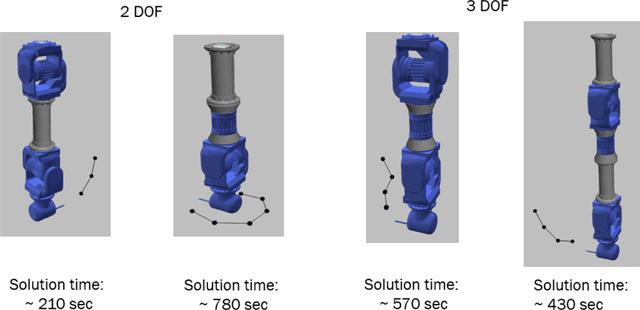
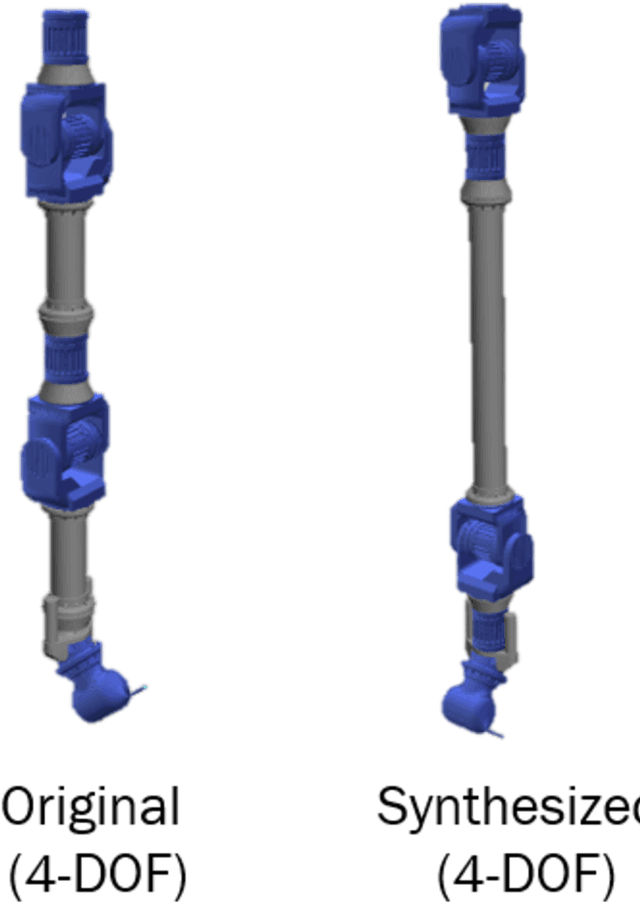
We present an interactive, computational design system for creating custom robotic arms given high-level task descriptions and environmental constraints. Various task requirements can be encoded as desired motion trajectories for the robot arm's end-effector. Given such end-effector trajectories, our system enables on-demand design of custom robot arms using a library of modular and reconfigurable parts such as actuators and connecting links. By searching through the combinatorial set of possible arrangements of these parts, our method generates a functional, as-simple-as-possible robot arm that is capable of tracking the desired trajectories. We demonstrate our system's capabilities by creating robot arm designs in simulation, for various trajectory following scenarios.