 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Rigid 3D Registration Solution: A Simple Method Free of SVD and Eigen-Decomposition
Paper and Code
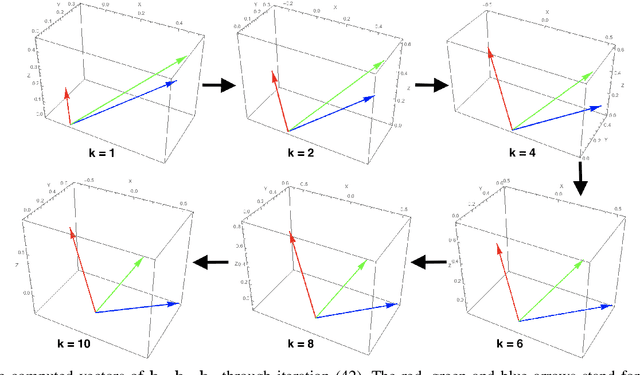
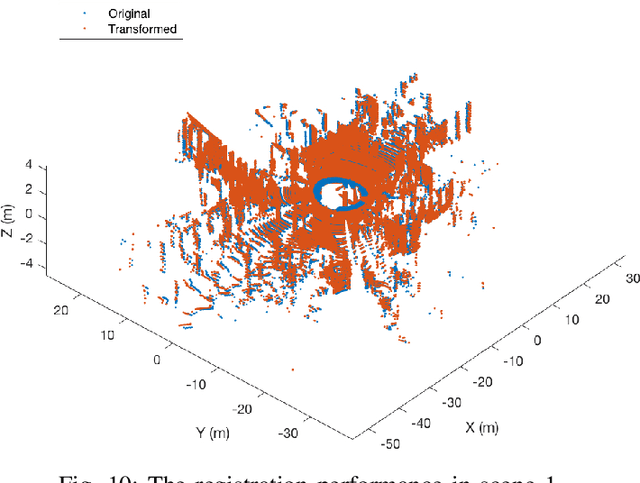
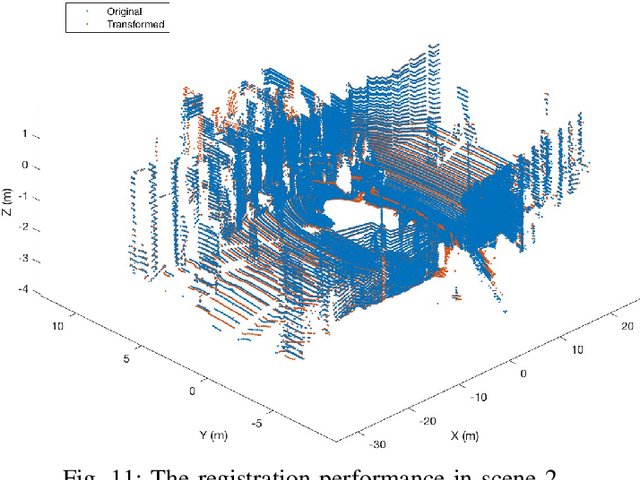
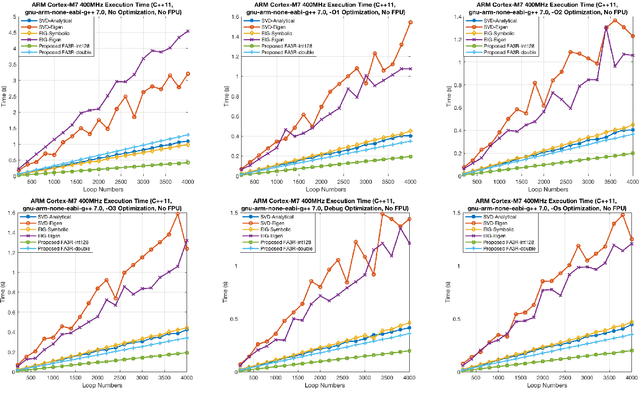
A novel solution is obtained to solve the rigid 3D registration problem, motivated by previous eigen-decomposition approaches. Different from existing solvers, the proposed algorithm does not require sophisticated matrix operations e.g. singular value decomposition or eigenvalue decomposition. Instead, the optimal eigenvector of the point cross-covariance matrix can be computed within several iterations. It is also proven that the optimal rotation matrix can be directly computed for cases without need of quaternion. The simple framework provides very easy approach of integer-implementation on embedded platforms. Simulations on noise-corrupted point clouds have verified the robustness and computation speed of the proposed method. The final results indicate that the proposed algorithm is accurate, robust and owns over $60\% \sim 80\%$ less computation time than representatives. It has also been applied to real-world applications for faster relative robotic navigation.