 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Road Lanes Using Laser Remission and Deep Neural Networks
Paper and Code
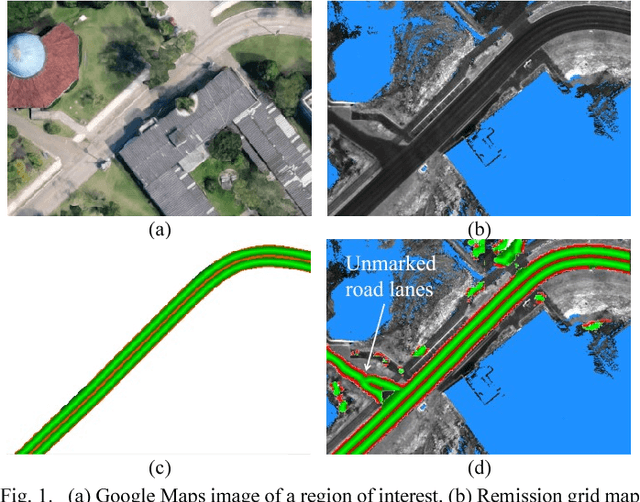
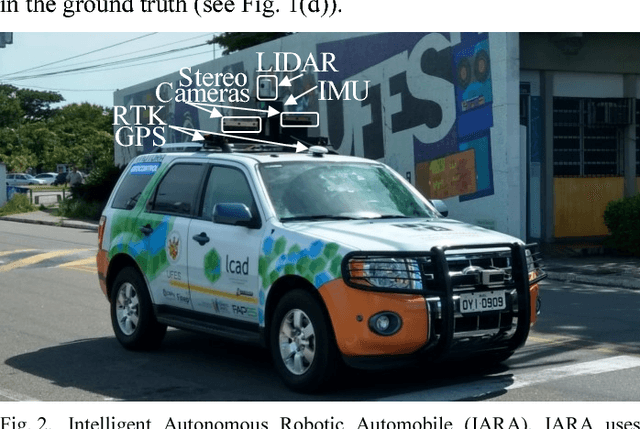
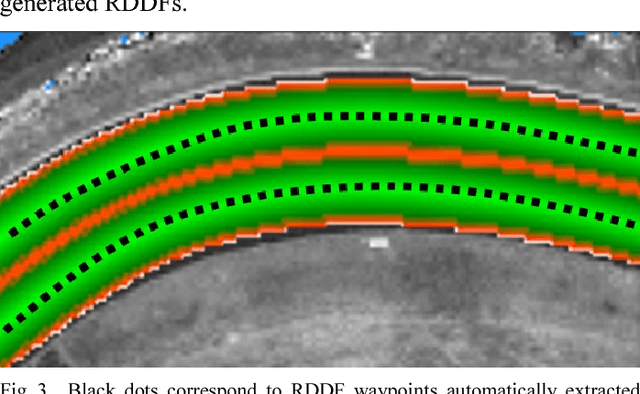
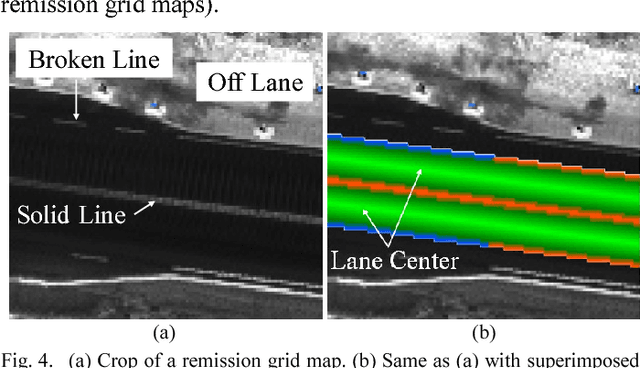
We propose the use of deep neural networks (DNN) for solving the problem of inferring the position and relevant properties of lanes of urban roads with poor or absent horizontal signalization, in order to allow the operation of autonomous cars in such situations. We take a segmentation approach to the problem and use the Efficient Neural Network (ENet) DNN for segmenting LiDAR remission grid maps into road maps. We represent road maps using what we called road grid maps. Road grid maps are square matrixes and each element of these matrixes represents a small square region of real-world space. The value of each element is a code associated with the semantics of the road map. Our road grid maps contain all information about the roads' lanes required for building the Road Definition Data Files (RDDFs) that are necessary for the operation of our autonomous car, IARA (Intelligent Autonomous Robotic Automobile). We have built a dataset of tens of kilometers of manually marked road lanes and used part of it to train ENet to segment road grid maps from remission grid maps. After being trained, ENet achieved an average segmentation accuracy of 83.7%. We have tested the use of inferred road grid maps in the real world using IARA on a stretch of 3.7 km of urban roads and it has shown performance equivalent to that of the previous IARA's subsystem that uses a manually generated RDDF.