 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reinforcement Learning Based Approach for Automated Lane Change Maneuvers
Paper and Code
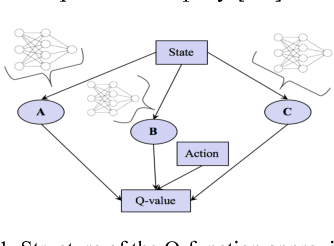
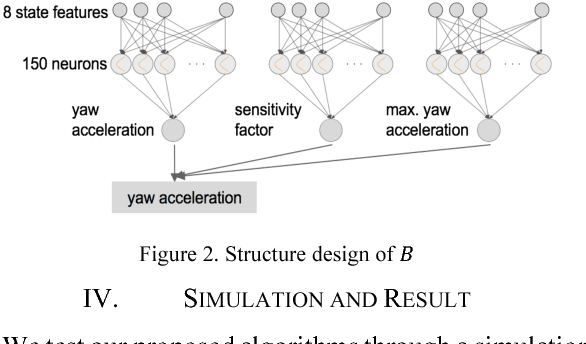
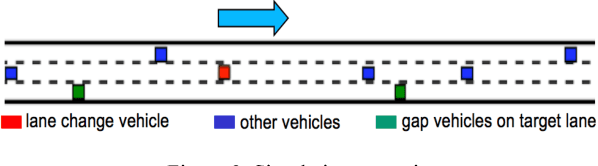
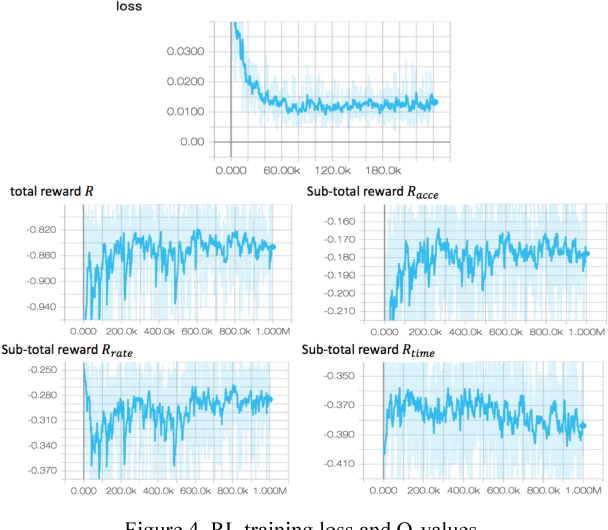
Lane change is a crucial vehicle maneuver which needs coordination with surrounding vehicles. Automated lane changing functions built on rule-based models may perform well under pre-defined operating conditions, but they may be prone to failure when unexpected situations are encountered. In our study, we proposed a Reinforcement Learning based approach to train the vehicle agent to learn an automated lane change behavior such that it can intelligently make a lane change under diverse and even unforeseen scenarios. Particularly, we treated both state space and action space as continuous, and designed a Q-function approximator that has a closed- form greedy policy, which contributes to the computation efficiency of our deep Q-learning algorithm. Extensive simulations are conducted for training the algorithm, and the results illustrate that the Reinforcement Learning based vehicle agent is capable of learning a smooth and efficient driving policy for lane change maneuvers.