 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Constraints using Vector Field Inequalities for Surgical Robots
Paper and Code
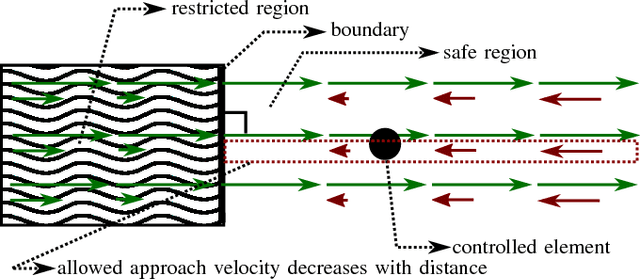
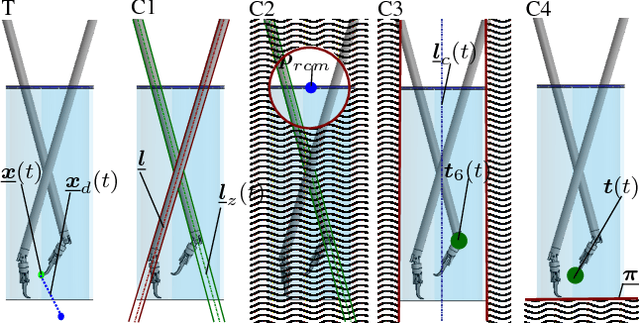
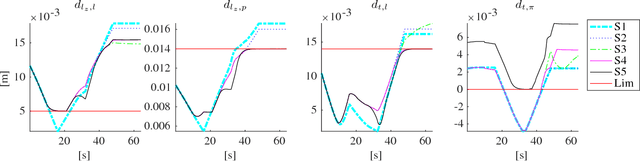
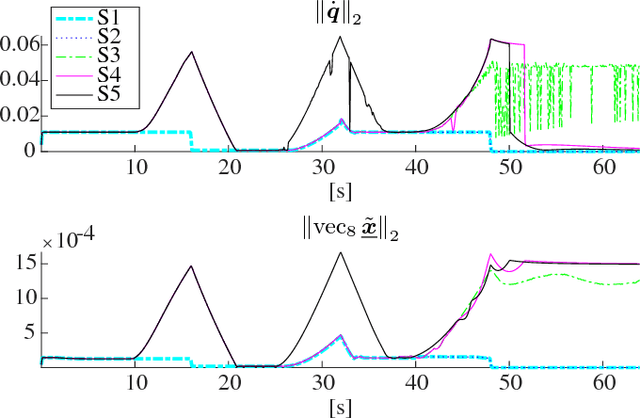
Robotic assistance allows surgeons to perform dexterous and tremor-free procedures, but is still underrepresented in deep brain neurosurgery and endonasal surgery where the workspace is constrained. In these conditions, the vision of surgeons is restricted to areas near the surgical tool tips, which increases the risk of unexpected collisions between the shafts of the instruments and their surroundings, in particular in areas outside the surgical field-of-view. Active constraints can be used to prevent the tools from entering restricted zones and thus avoid collisions. In this paper, a vector field inequality is proposed that guarantees that tools do not enter restricted zones. Moreover, in contrast with early techniques, the proposed method limits the tool approach velocity in the direction of the forbidden zone boundary, guaranteeing a smooth behavior and that tangential velocities will not be disturbed. The proposed method is evaluated in simulations featuring two eight degrees-of-freedom manipulators that were custom-designed for deep neurosurgery. The results show that both manipulator-manipulator and manipulator-boundary collisions can be avoided using the vector field inequalities.