 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated pick-up of suturing needles for robotic surgical assistance
Paper and Code
Apr 09, 2018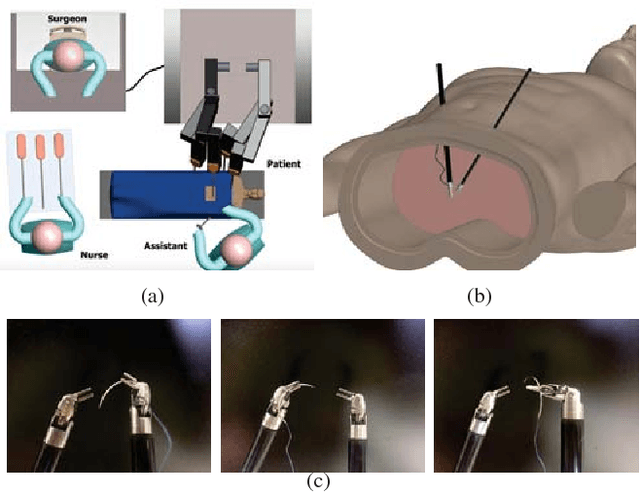
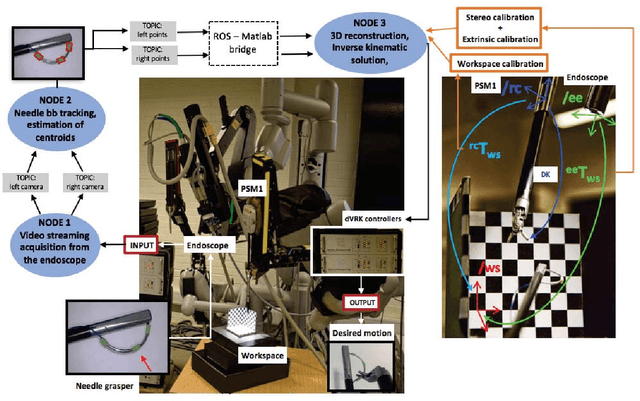
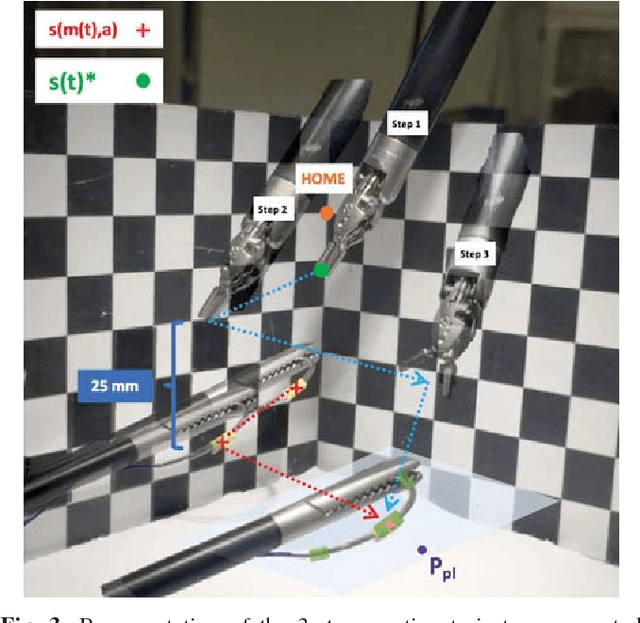
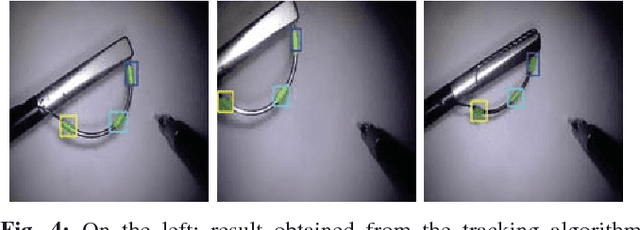
Robot-assisted laparoscopic prostatectomy (RALP) is a treatment for prostate cancer that involves complete or nerve sparing removal prostate tissue that contains cancer. After removal the bladder neck is successively sutured directly with the urethra. The procedure is called urethrovesical anastomosis and is one of the most dexterity demanding tasks during RALP. Two suturing instruments and a pair of needles are used in combination to perform a running stitch during urethrovesical anastomosis. While robotic instruments provide enhanced dexterity to perform the anastomosis, it is still highly challenging and difficult to learn. In this paper, we presents a vision-guided needle grasping method for automatically grasping the needle that has been inserted into the patient prior to anastomosis. We aim to automatically grasp the suturing needle in a position that avoids hand-offs and immediately enables the start of suturing. The full grasping process can be broken down into: a needle detection algorithm; an approach phase where the surgical tool moves closer to the needle based on visual feedback; and a grasping phase through path planning based on observed surgical practice. Our experimental results show examples of successful autonomous grasping that has the potential to simplify and decrease the operational time in RALP by assisting a small component of urethrovesical anastomosis.