 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Flexible and Reusable Locomotion Primitives for a Microrobot
Paper and Code
Mar 01, 2018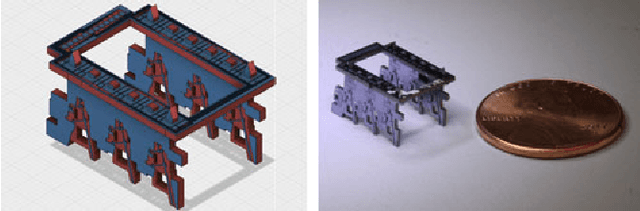

The design of gaits for robot locomotion can be a daunting process which requires significant expert knowledge and engineering. This process is even more challenging for robots that do not have an accurate physical model, such as compliant or micro-scale robots. Data-driven gait optimization provides an automated alternative to analytical gait design. In this paper, we propose a novel approach to efficiently learn a wide range of locomotion tasks with walking robots. This approach formalizes locomotion as a contextual policy search task to collect data, and subsequently uses that data to learn multi-objective locomotion primitives that can be used for planning. As a proof-of-concept we consider a simulated hexapod modeled after a recently developed microrobot, and we thoroughly evaluate the performance of this microrobot on different tasks and gaits. Our results validate the proposed controller and learning scheme on single and multi-objective locomotion tasks. Moreover, the experimental simulations show that without any prior knowledge about the robot used (e.g., dynamics model), our approach is capable of learning locomotion primitives within 250 trials and subsequently using them to successfully navigate through a maze.