 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCascade Attribute Learning Network
Paper and Code
Nov 24, 2017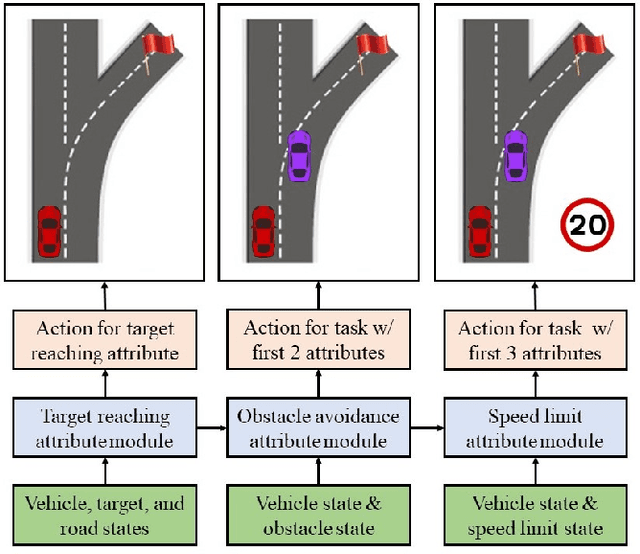
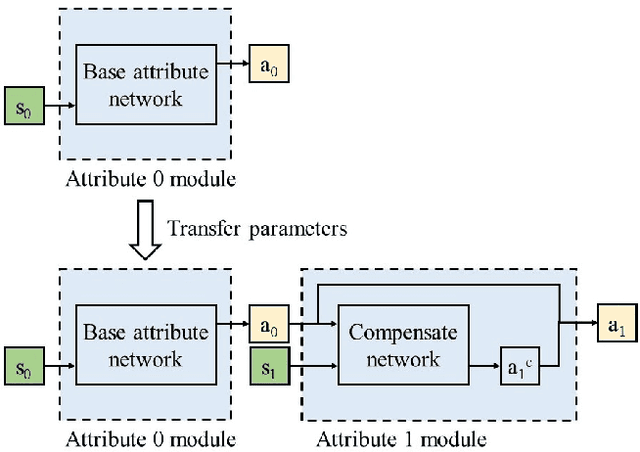
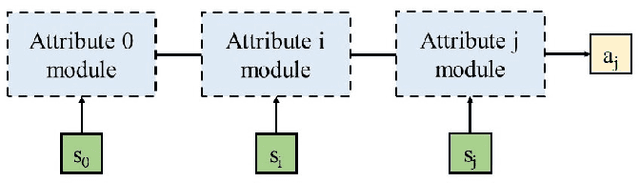
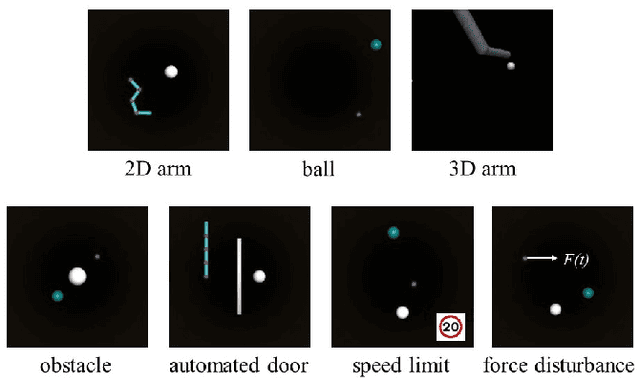
We propose the cascade attribute learning network (CALNet), which can learn attributes in a control task separately and assemble them together. Our contribution is twofold: first we propose attribute learning in reinforcement learning (RL). Attributes used to be modeled using constraint functions or terms in the objective function, making it hard to transfer. Attribute learning, on the other hand, models these task properties as modules in the policy network. We also propose using novel cascading compensative networks in the CALNet to learn and assemble attributes. Using the CALNet, one can zero shoot an unseen task by separately learning all its attributes, and assembling the attribute modules. We have validated the capacity of our model on a wide variety of control problems with attributes in time, position, velocity and acceleration phases.