 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDART: Distribution Aware Retinal Transform for Event-based Cameras
Paper and Code
Oct 30, 2017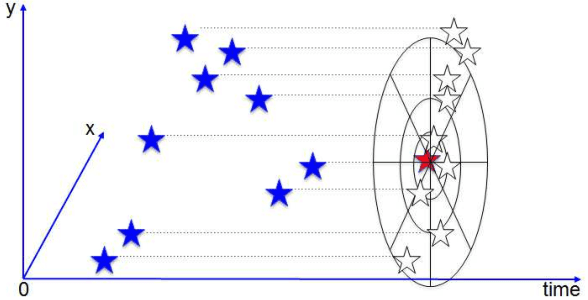
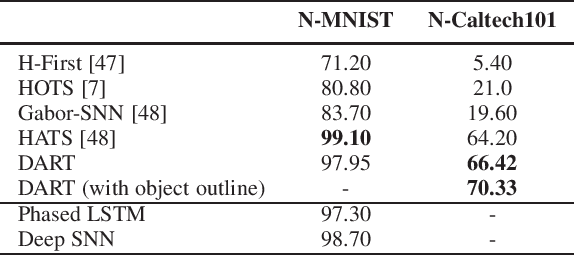
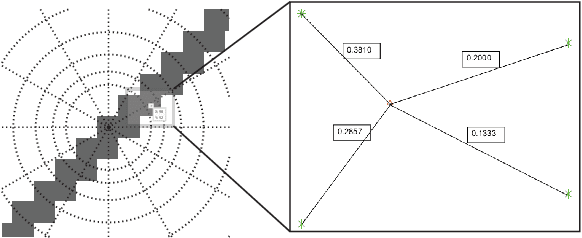
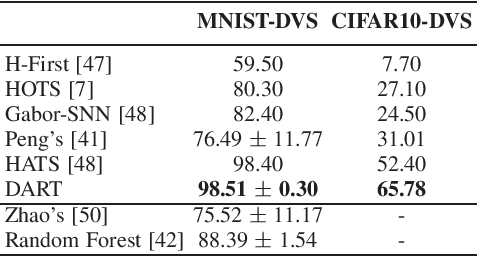
We introduce a new event-based visual descriptor, termed as distribution aware retinal transform (DART), for pattern recognition using silicon retina cameras. The DART descriptor captures the information of the spatio-temporal distribution of events, and forms a rich structural representation. Consequently, the event context encoded by DART greatly simplifies the feature correspondence problem, which is highly relevant to many event-based vision problems. The proposed descriptor is robust to scale and rotation variations without the need for spectral analysis. To demonstrate the effectiveness of the DART descriptors, they are employed as local features in the bag-of-features classification framework. The proposed framework is tested on the N-MNIST, MNIST-DVS, CIFAR10-DVS, NCaltech-101 datasets, as well as a new object dataset, N-SOD (Neuromorphic-Single Object Dataset), collected to test unconstrained viewpoint recognition. We report a competitive classification accuracy of 97.95% on the N-MNIST and the best classification accuracy compared to existing works on the MNIST-DVS (99%), CIFAR10-DVS (65.9%) and NCaltech-101 (70.3%). Using the in-house N-SOD, we demonstrate real-time classification performance on an Intel Compute Stick directly interfaced to an event camera flying on-board a quadcopter. In addition, taking advantage of the high-temporal resolution of event cameras, the classification system is extended to tackle object tracking. Finally, we demonstrate efficient feature matching for event-based cameras using kd-trees.