 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multimodal, Full-Surround Vehicular Testbed for Naturalistic Studies and Benchmarking: Design, Calibration and Deployment
Paper and Code
Mar 20, 2018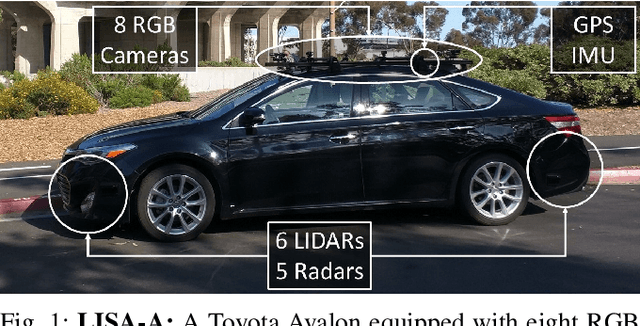
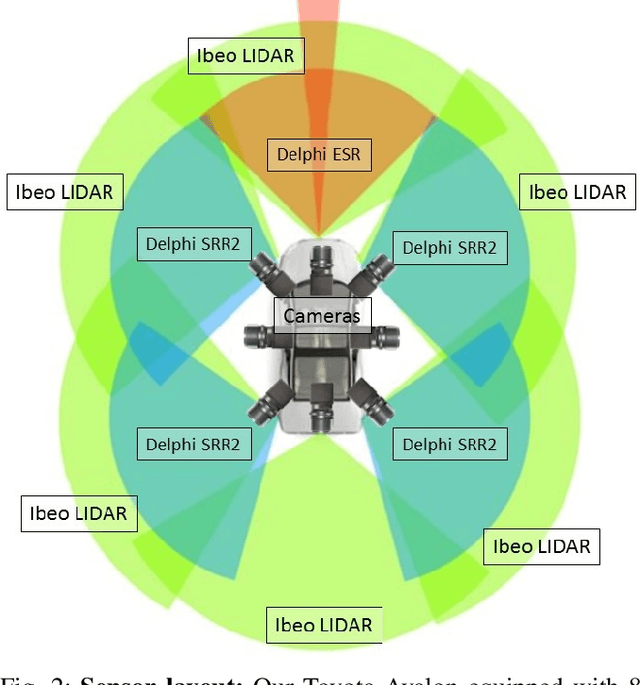
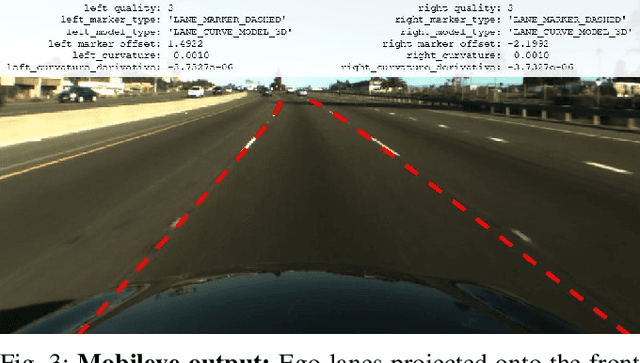
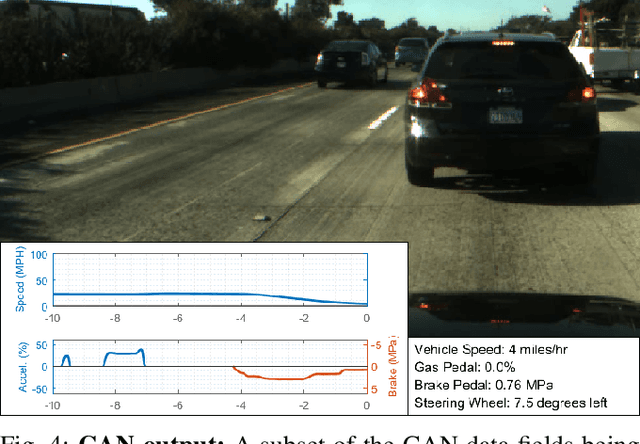
Recent progress in autonomous and semi-autonomous driving has been made possible in part through an assortment of sensors that provide the intelligent agent with an enhanced perception of its surroundings. It has been clear for quite some while now that for intelligent vehicles to function effectively in all situations and conditions, a fusion of different sensor technologies is essential. Consequently, the availability of synchronized multi-sensory data streams are necessary to promote the development of fusion based algorithms for low, mid and high level semantic tasks. In this paper, we provide a comprehensive description of LISA-A: our heavily sensorized, full-surround testbed capable of providing high quality data from a slew of synchronized and calibrated sensors such as cameras, LIDARs, radars, and the IMU/GPS. The vehicle has recorded over 100 hours of real world data for a very diverse set of weather, traffic and daylight conditions. All captured data is accurately calibrated and synchronized using timestamps, and stored safely in high performance servers mounted inside the vehicle itself. Details on the testbed instrumentation, sensor layout, sensor outputs, calibration and synchronization are described in this paper.