 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Reliable Autonomous Surgical Debridement with Cable-Driven Robots Using a Two-Phase Calibration Procedure
Paper and Code
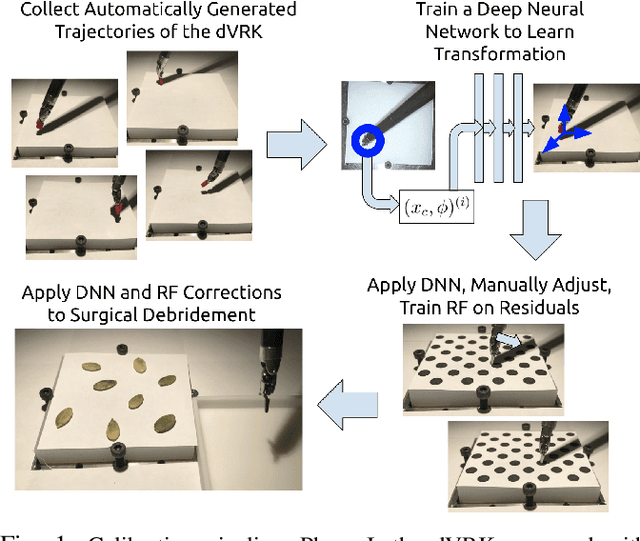
Automating precision subtasks such as debridement (removing dead or diseased tissue fragments) with Robotic Surgical Assistants (RSAs) such as the da Vinci Research Kit (dVRK) is challenging due to inherent non-linearities in cable-driven systems. We propose and evaluate a novel two-phase coarse-to-fine calibration method. In Phase I (coarse), we place a red calibration marker on the end effector and let it randomly move through a set of open-loop trajectories to obtain a large sample set of camera pixels and internal robot end-effector configurations. This coarse data is then used to train a Deep Neural Network (DNN) to learn the coarse transformation bias. In Phase II (fine), the bias from Phase I is applied to move the end-effector toward a small set of specific target points on a printed sheet. For each target, a human operator manually adjusts the end-effector position by direct contact (not through teleoperation) and the residual compensation bias is recorded. This fine data is then used to train a Random Forest (RF) to learn the fine transformation bias. Subsequent experiments suggest that without calibration, position errors average 4.55mm. Phase I can reduce average error to 2.14mm and the combination of Phase I and Phase II can reduces average error to 1.08mm. We apply these results to debridement of raisins and pumpkin seeds as fragment phantoms. Using an endoscopic stereo camera with standard edge detection, experiments with 120 trials achieved average success rates of 94.5%, exceeding prior results with much larger fragments (89.4%) and achieving a speedup of 2.1x, decreasing time per fragment from 15.8 seconds to 7.3 seconds. Source code, data, and videos are available at https://sites.google.com/view/calib-icra/.