 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMBMF: Model-Based Priors for Model-Free Reinforcement Learning
Paper and Code
Oct 17, 2017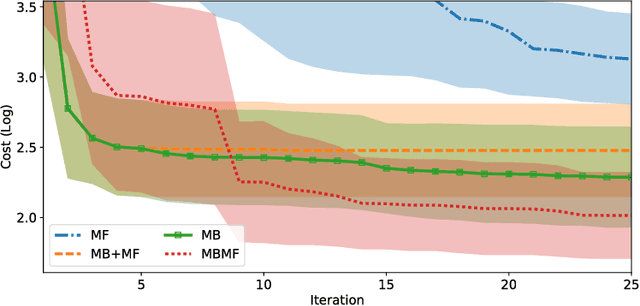
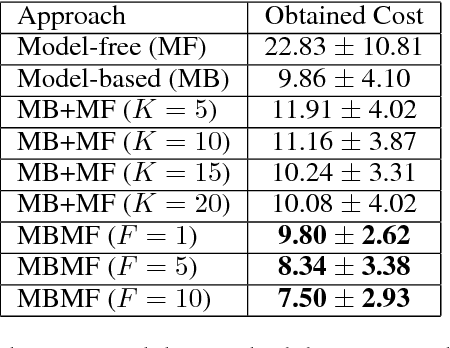
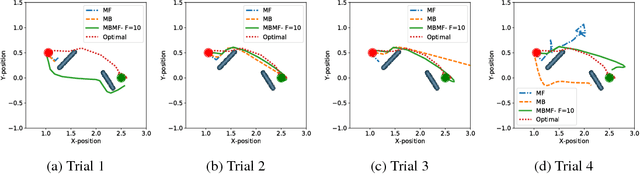
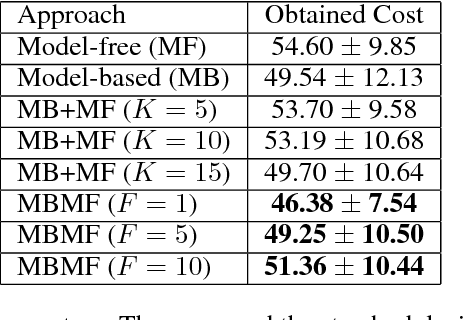
Reinforcement Learning is divided in two main paradigms: model-free and model-based. Each of these two paradigms has strengths and limitations, and has been successfully applied to real world domains that are appropriate to its corresponding strengths. In this paper, we present a new approach aimed at bridging the gap between these two paradigms. We aim to take the best of the two paradigms and combine them in an approach that is at the same time data-efficient and cost-savvy. We do so by learning a probabilistic dynamics model and leveraging it as a prior for the intertwined model-free optimization. As a result, our approach can exploit the generality and structure of the dynamics model, but is also capable of ignoring its inevitable inaccuracies, by directly incorporating the evidence provided by the direct observation of the cost. Preliminary results demonstrate that our approach outperforms purely model-based and model-free approaches, as well as the approach of simply switching from a model-based to a model-free setting.