 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Optimal Planning and Control of Non-Periodic Bipedal Locomotion with A Centroidal Momentum Model
Paper and Code
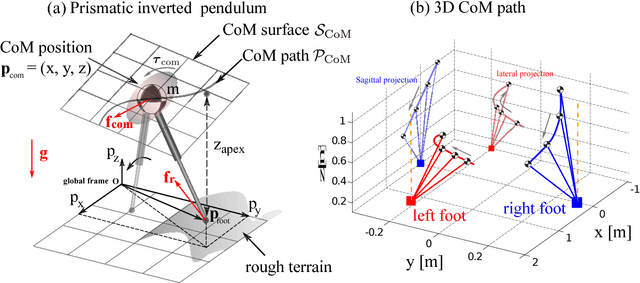
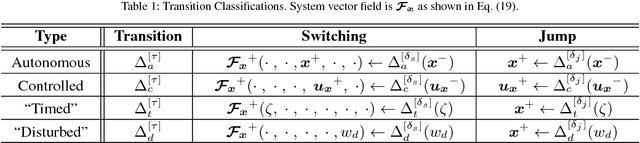
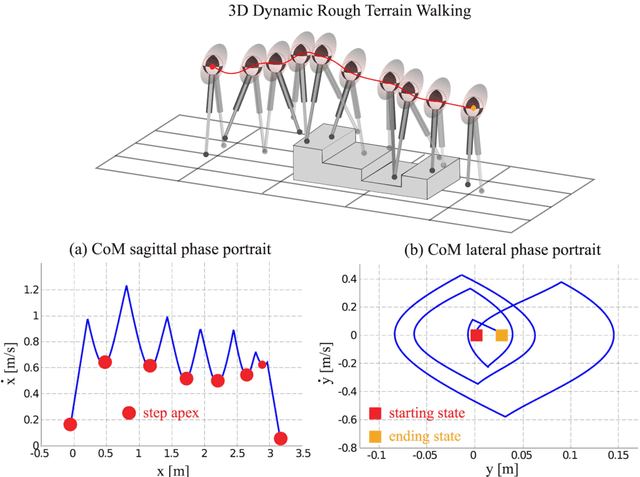
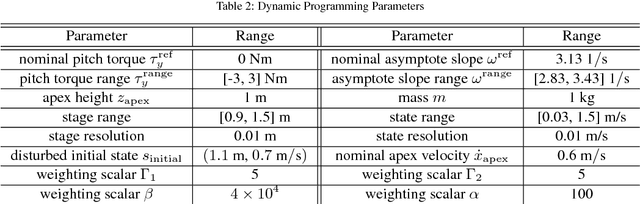
This study presents a theoretical method for planning and controlling agile bipedal locomotion based on robustly tracking a set of non-periodic keyframe states. Based on centroidal momentum dynamics, we formulate a hybrid phase-space planning and control method which includes the following key components: (i) a step transition solver that enables dynamically tracking non-periodic keyframe states over various types of terrains, (ii) a robust hybrid automaton to effectively formulate planning and control algorithms, (iii) a steering direction model to control the robot's heading, (iv) a phase-space metric to measure distance to the planned locomotion manifolds, and (v) a hybrid control method based on the previous distance metric to produce robust dynamic locomotion under external disturbances. Compared to other locomotion methodologies, we have a large focus on non-periodic gait generation and robustness metrics to deal with disturbances. Such focus enables the proposed control method to robustly track non-periodic keyframe states over various challenging terrains and under external disturbances as illustrated through several simulations.