 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Optimal Planning and Control of Non-Periodic Bipedal Locomotion with A Centroidal Momentum Model
Aug 19, 2017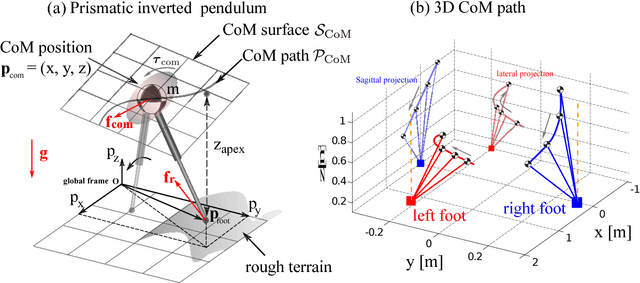
This study presents a theoretical method for planning and controlling agile bipedal locomotion based on robustly tracking a set of non-periodic keyframe states. Based on centroidal momentum dynamics, we formulate a hybrid phase-space planning and control method which includes the following key components: (i) a step transition solver that enables dynamically tracking non-periodic keyframe states over various types of terrains, (ii) a robust hybrid automaton to effectively formulate planning and control algorithms, (iii) a steering direction model to control the robot's heading, (iv) a phase-space metric to measure distance to the planned locomotion manifolds, and (v) a hybrid control method based on the previous distance metric to produce robust dynamic locomotion under external disturbances. Compared to other locomotion methodologies, we have a large focus on non-periodic gait generation and robustness metrics to deal with disturbances. Such focus enables the proposed control method to robustly track non-periodic keyframe states over various challenging terrains and under external disturbances as illustrated through several simulations.
A Framework for Planning and Controlling Non-Periodic Bipedal Locomotion
Nov 14, 2015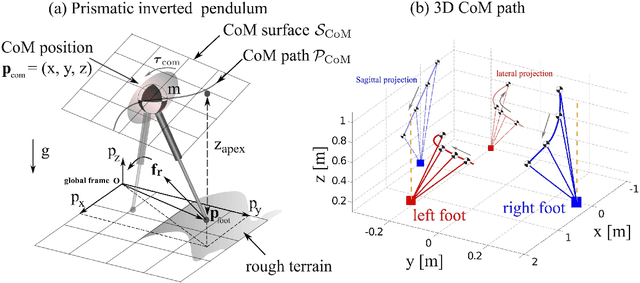
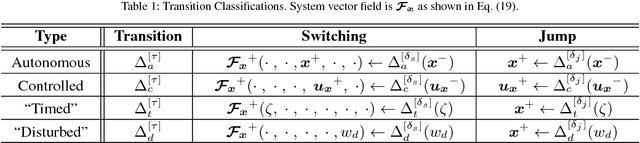
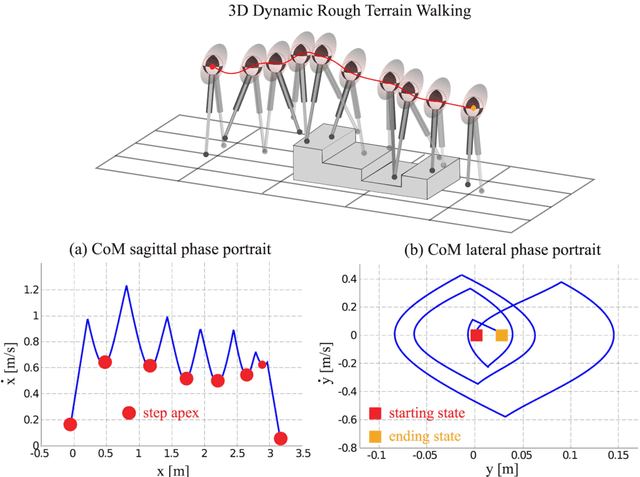
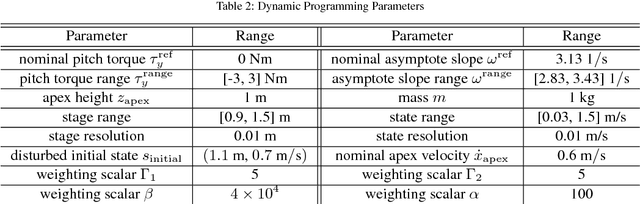
This study presents a theoretical framework for planning and controlling agile bipedal locomotion based on robustly tracking a set of non-periodic apex states. Based on the prismatic inverted pendulum model, we formulate a hybrid phase-space planning and control framework which includes the following key components: (1) a step transition solver that enables dynamically tracking non-periodic apex or keyframe states over various types of terrains, (2) a robust hybrid automaton to effectively formulate planning and control algorithms, (3) a phase-space metric to measure distance to the planned locomotion manifolds, and (4) a hybrid control method based on the previous distance metric to produce robust dynamic locomotion under external disturbances. Compared to other locomotion frameworks, we have a larger focus on non-periodic gait generation and robustness metrics to deal with disturbances. Such focus enables the proposed control framework to robustly track non-periodic apex states over various challenging terrains and under external disturbances as illustrated through several simulations. Additionally, it allows a bipedal robot to perform non-periodic bouncing maneuvers over disjointed terrains.
Immuno-inspired robotic applications: a review
Feb 20, 2012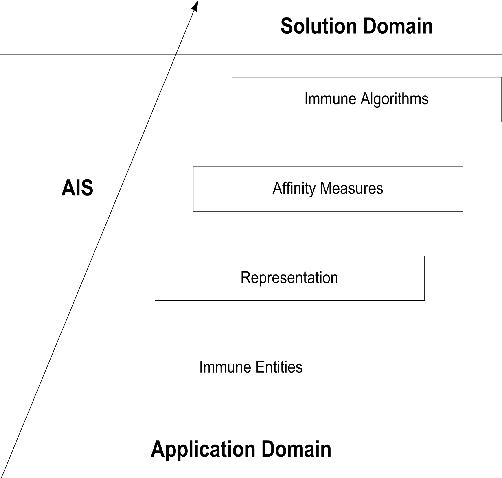
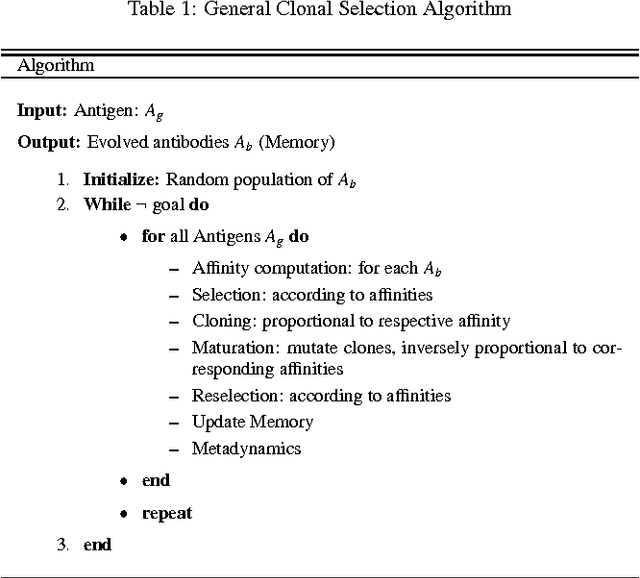
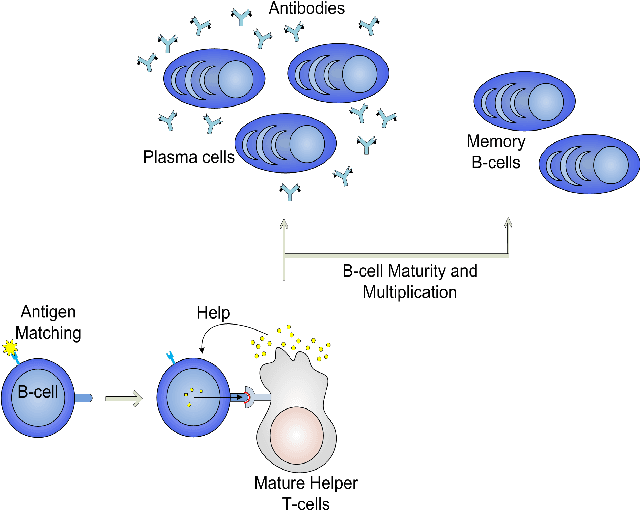
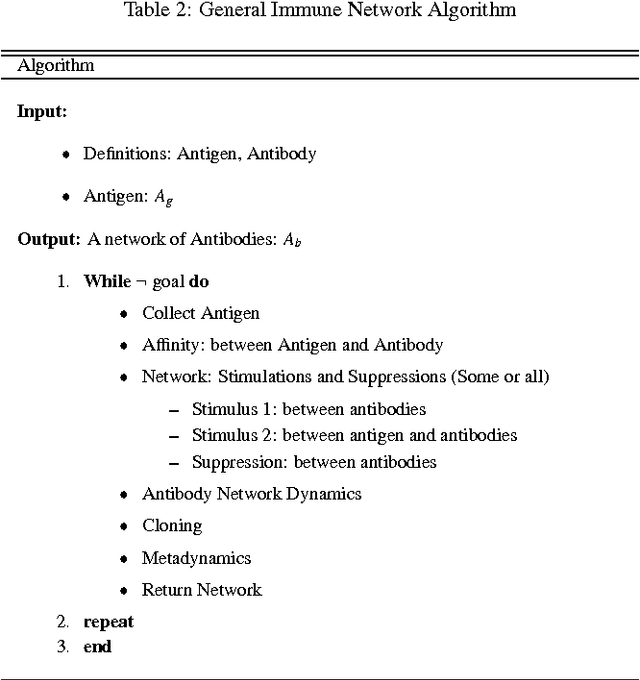
Artificial immune systems primarily mimic the adaptive nature of biological immune functions. Their ability to adapt to varying pathogens makes such systems a suitable choice for various robotic applications. Generally, AIS-based robotic applications map local instantaneous sensory information into either an antigen or a co-stimulatory signal, according to the choice of representation schema. Algorithms then use relevant immune functions to output either evolved antibodies or maturity of dendritic cells, in terms of actuation signals. It is observed that researchers, in an attempt to solve the problem in hand, do not try to replicate the biological immunity but select necessary immune functions instead, resulting in an ad-hoc manner these applications are reported. Authors, therefore, present a comprehensive review of immuno-inspired robotic applications in an attempt to categorize them according to underlying immune definitions. Implementation details are tabulated in terms of corresponding mathematical expressions and their representation schema that include binary, real or hybrid data. Limitations of reported applications are also identified in light of modern immunological interpretations. As a result of this study, authors suggest a renewed focus on innate immunity and also emphasize that immunological representations should benefit from robot embodiment and must be extended to include modern trends.