 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
Paper and Code


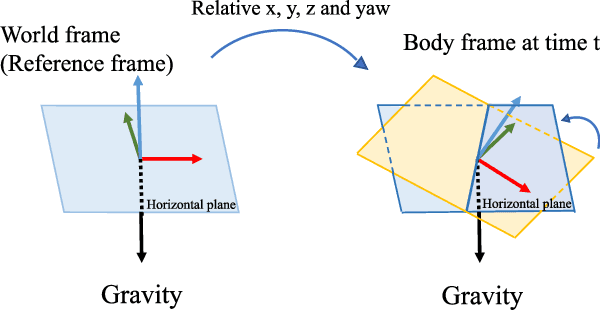
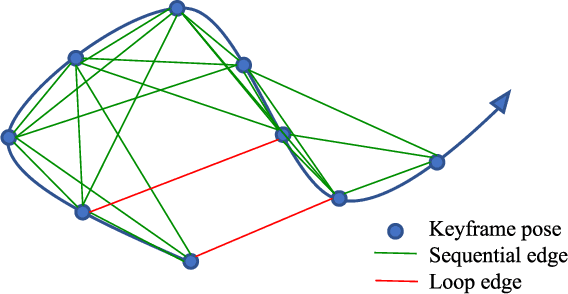
A monocular visual-inertial system (VINS), consisting of a camera and a low-cost inertial measurement unit (IMU), forms the minimum sensor suite for metric six degrees-of-freedom (DOF) state estimation. However, the lack of direct distance measurement poses significant challenges in terms of IMU processing, estimator initialization, extrinsic calibration, and nonlinear optimization. In this work, we present VINS-Mono: a robust and versatile monocular visual-inertial state estimator.Our approach starts with a robust procedure for estimator initialization and failure recovery. A tightly-coupled, nonlinear optimization-based method is used to obtain high accuracy visual-inertial odometry by fusing pre-integrated IMU measurements and feature observations. A loop detection module, in combination with our tightly-coupled formulation, enables relocalization with minimum computation overhead.We additionally perform four degrees-of-freedom pose graph optimization to enforce global consistency. We validate the performance of our system on public datasets and real-world experiments and compare against other state-of-the-art algorithms. We also perform onboard closed-loop autonomous flight on the MAV platform and port the algorithm to an iOS-based demonstration. We highlight that the proposed work is a reliable, complete, and versatile system that is applicable for different applications that require high accuracy localization. We open source our implementations for both PCs and iOS mobile devices.