 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Dynamic Locomotion via Reinforcement Learning and Novel Whole Body Controller
Paper and Code
Aug 07, 2017
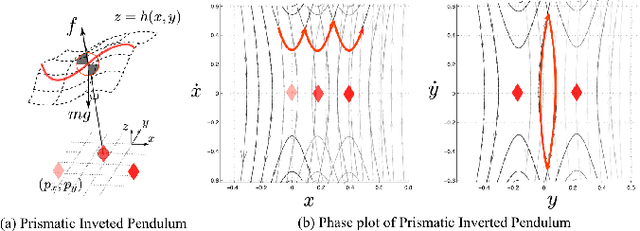
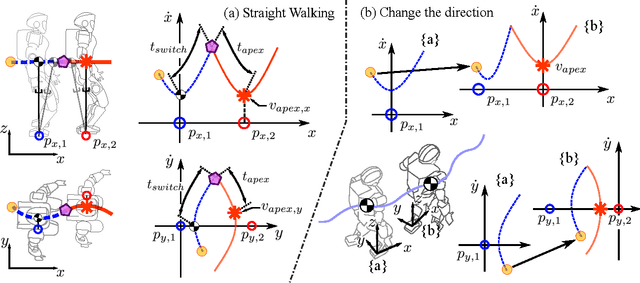
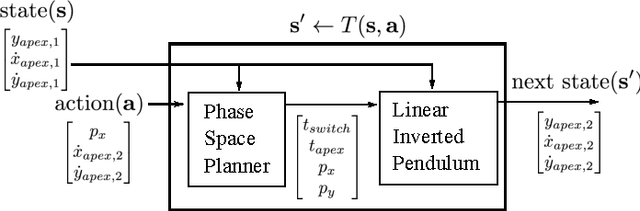
We propose a robust dynamic walking controller consisting of a dynamic locomotion planner, a reinforcement learning process for robustness, and a novel whole-body locomotion controller (WBLC). Previous approaches specify either the position or the timing of steps, however, the proposed locomotion planner simultaneously computes both of these parameters as locomotion outputs. Our locomotion strategy relies on devising a reinforcement learning (RL) approach for robust walking. The learned policy generates multi step walking patterns, and the process is quick enough to be suitable for real-time controls. For learning, we devise an RL strategy that uses a phase space planner (PSP) and a linear inverted pendulum model to make the problem tractable and very fast. Then, the learned policy is used to provide goal-based commands to the WBLC, which calculates the torque commands to be executed in full-humanoid robots. The WBLC combines multiple prioritized tasks and calculates the associated reaction forces based on practical inequality constraints. The novel formulation includes efficient calculation of the time derivatives of various Jacobians. This provides high-fidelity dynamic control of fast motions. More specifically, we compute the time derivative of the Jacobian for various tasks and the Jacobian of the centroidal momentum task by utilizing Lie group operators and operational space dynamics respectively. The integration of RL-PSP and the WBLC provides highly robust, versatile, and practical locomotion including steering while walking and handling push disturbances of up to 520 N during an interval of 0.1 sec. Theoretical and numerical results are tested through a 3D physics-based simulation of the humanoid robot Valkyrie.