Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Prediction by Planning using Deep Neural Networks
Paper and Code
Jun 20, 2017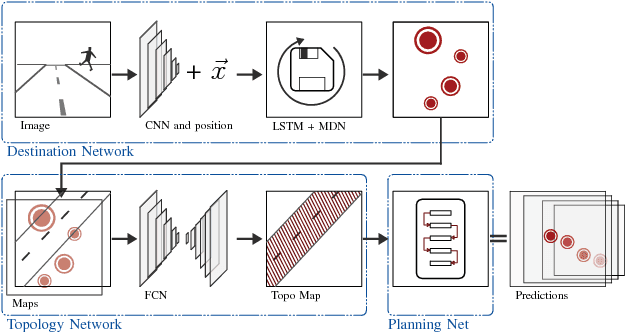
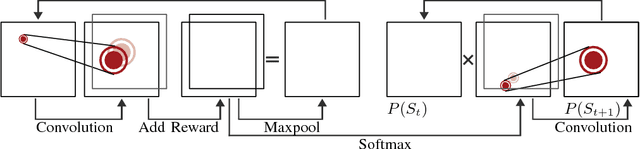
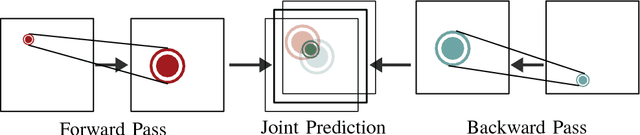
Accurate traffic participant prediction is the prerequisite for collision avoidance of autonomous vehicles. In this work, we predict pedestrians by emulating their own motion planning. From online observations, we infer a mixture density function for possible destinations. We use this result as the goal states of a planning stage that performs motion prediction based on common behavior patterns. The entire system is modeled as one monolithic neural network and trained via inverse reinforcement learning. Experimental validation on real world data shows the system's ability to predict both, destinations and trajectories accurately.
View paper on