 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Monocular Visual-inertial SLAM using a Map-assisted EKF Approach
Paper and Code
Mar 31, 2018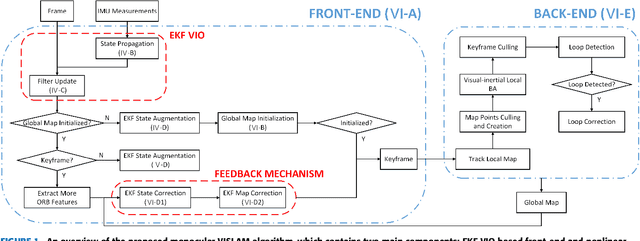
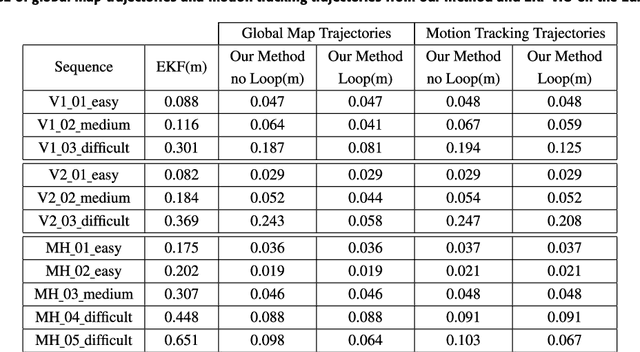
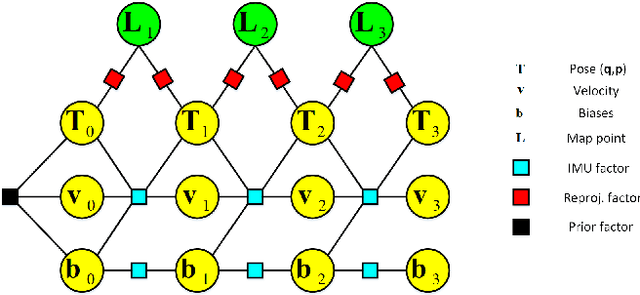
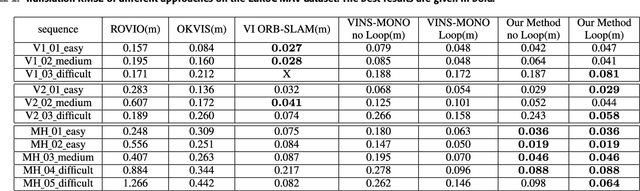
This paper presents a novel tightly-coupled monocular visual-inertial Simultaneous Localization and Mapping algorithm, which provides accurate and robust localization within the globally consistent map in real time on a standard CPU. This is achieved by firstly performing the visual-inertial extended kalman filter(EKF) to provide motion estimate at a high rate. However the filter becomes inconsistent due to the well known linearization issues. So we perform a keyframe-based visual-inertial bundle adjustment to improve the consistency and accuracy of the system. In addition, a loop closure detection and correction module is also added to eliminate the accumulated drift when revisiting an area. Finally, the optimized motion estimates and map are fed back to the EKF-based visual-inertial odometry module, thus the inconsistency and estimation error of the EKF estimator are reduced. In this way, the system can continuously provide reliable motion estimates for the long-term operation. The performance of the algorithm is validated on public datasets and real-world experiments, which proves the superiority of the proposed algorithm.