 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Cooperative Navigation in Dense Human Crowds
Paper and Code
May 17, 2017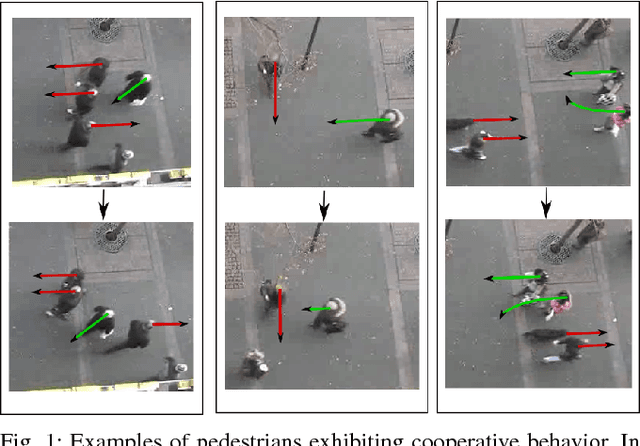
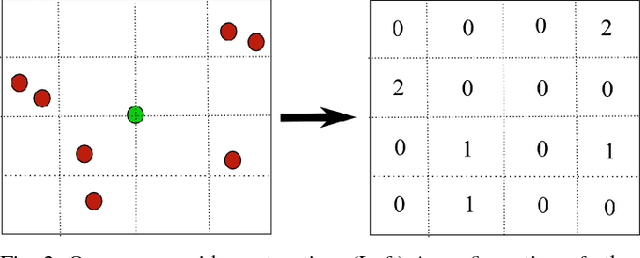

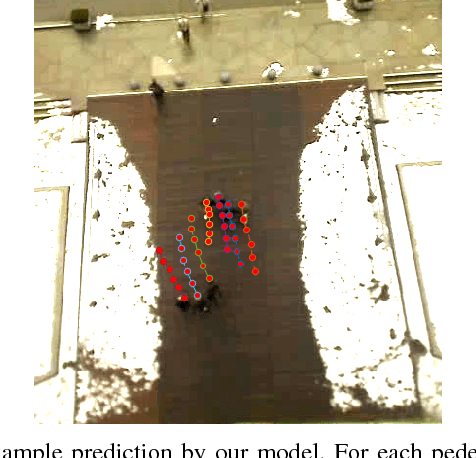
For robots to be a part of our daily life, they need to be able to navigate among crowds not only safely but also in a socially compliant fashion. This is a challenging problem because humans tend to navigate by implicitly cooperating with one another to avoid collisions, while heading toward their respective destinations. Previous approaches have used hand-crafted functions based on proximity to model human-human and human-robot interactions. However, these approaches can only model simple interactions and fail to generalize for complex crowded settings. In this paper, we develop an approach that models the joint distribution over future trajectories of all interacting agents in the crowd, through a local interaction model that we train using real human trajectory data. The interaction model infers the velocity of each agent based on the spatial orientation of other agents in his vicinity. During prediction, our approach infers the goal of the agent from its past trajectory and uses the learned model to predict its future trajectory. We demonstrate the performance of our method against a state-of-the-art approach on a public dataset and show that our model outperforms when predicting future trajectories for longer horizons.