 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistically Safe Policy Transfer
Paper and Code
May 15, 2017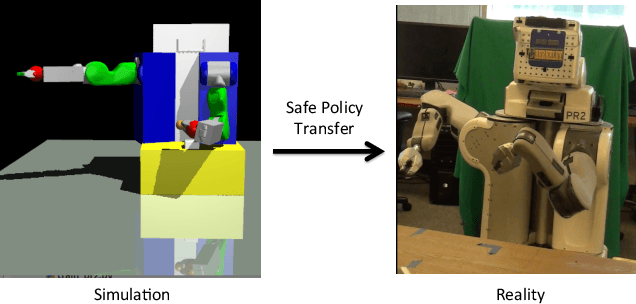
Although learning-based methods have great potential for robotics, one concern is that a robot that updates its parameters might cause large amounts of damage before it learns the optimal policy. We formalize the idea of safe learning in a probabilistic sense by defining an optimization problem: we desire to maximize the expected return while keeping the expected damage below a given safety limit. We study this optimization for the case of a robot manipulator with safety-based torque limits. We would like to ensure that the damage constraint is maintained at every step of the optimization and not just at convergence. To achieve this aim, we introduce a novel method which predicts how modifying the torque limit, as well as how updating the policy parameters, might affect the robot's safety. We show through a number of experiments that our approach allows the robot to improve its performance while ensuring that the expected damage constraint is not violated during the learning process.