 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Fly by Crashing
Paper and Code
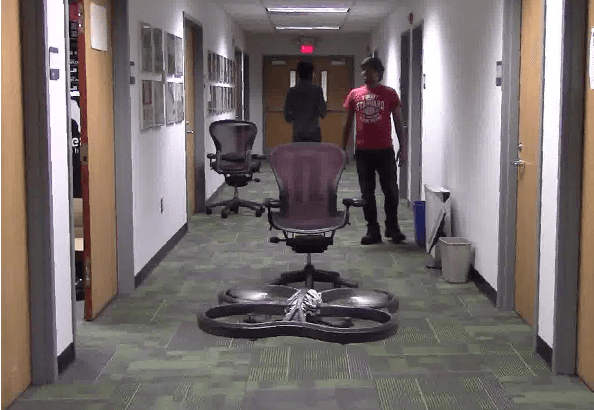
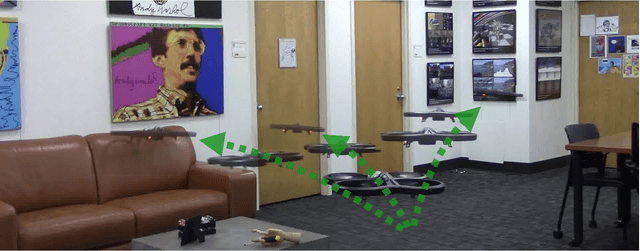
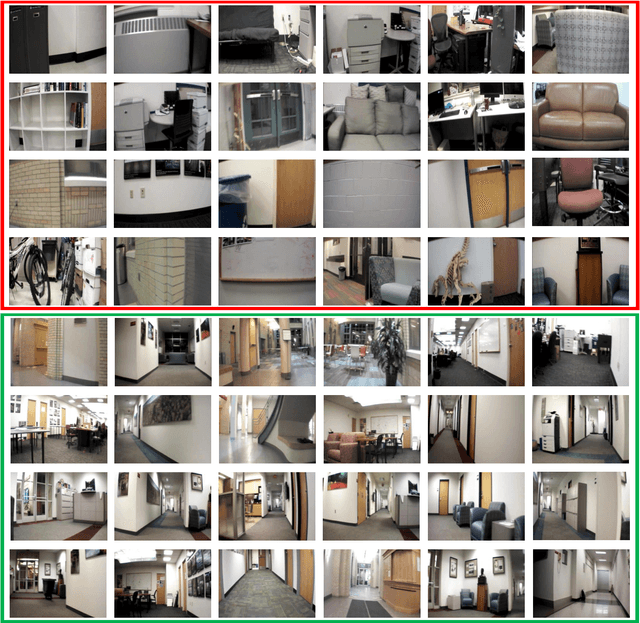
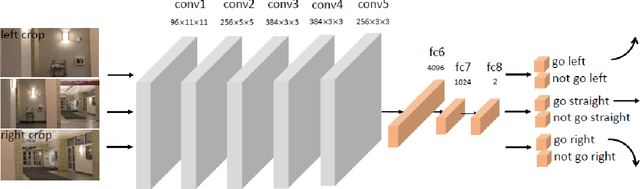
How do you learn to navigate an Unmanned Aerial Vehicle (UAV) and avoid obstacles? One approach is to use a small dataset collected by human experts: however, high capacity learning algorithms tend to overfit when trained with little data. An alternative is to use simulation. But the gap between simulation and real world remains large especially for perception problems. The reason most research avoids using large-scale real data is the fear of crashes! In this paper, we propose to bite the bullet and collect a dataset of crashes itself! We build a drone whose sole purpose is to crash into objects: it samples naive trajectories and crashes into random objects. We crash our drone 11,500 times to create one of the biggest UAV crash dataset. This dataset captures the different ways in which a UAV can crash. We use all this negative flying data in conjunction with positive data sampled from the same trajectories to learn a simple yet powerful policy for UAV navigation. We show that this simple self-supervised model is quite effective in navigating the UAV even in extremely cluttered environments with dynamic obstacles including humans. For supplementary video see: https://youtu.be/u151hJaGKUo