 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndirect Shared Control of Highly Automated Vehicles for Cooperative Driving between Driver and Automation
Paper and Code
Apr 04, 2017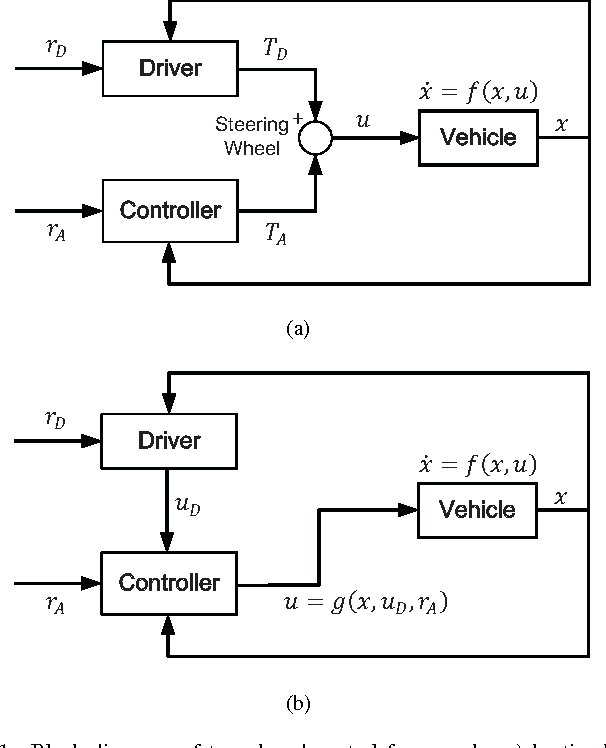
It is widely acknowledged that drivers should remain in the control loop of automated vehicles before they completely meet real-world operational conditions. This paper introduces an `indirect shared control' scheme for steer-by-wire vehicles, which allows the vehicle control authority to be continuously shared between the driver and automation through unphysical cooperation. This paper first balances the control objectives of the driver and automation in a weighted summation, and then models the driver's adaptive control behavior using a predictive control approach. The driver adaptation modeling enables off-line evaluations of indirect shared control systems and thus facilitates the design of the assistant controller. Unlike any conventional driver model for manual driving, this model assumes that the driver can learn and incorporate the controller strategy into his internal model for more accurate path following. To satisfy the driving demands in different scenarios, a sliding-window detector is designed to continuously monitor the driver intention and automatically switch the authority weights between the driver and automation. The simulation results illustrate the advantages of considering the driver adaptation in path-following and obstacle-avoidance tasks, and show the effectiveness of indirect shared control for cooperative driving.