 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegICP: Integrated Deep Semantic Segmentation and Pose Estimation
Paper and Code
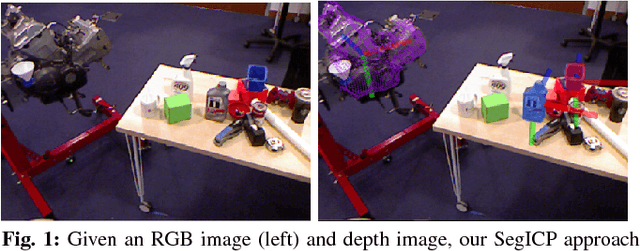
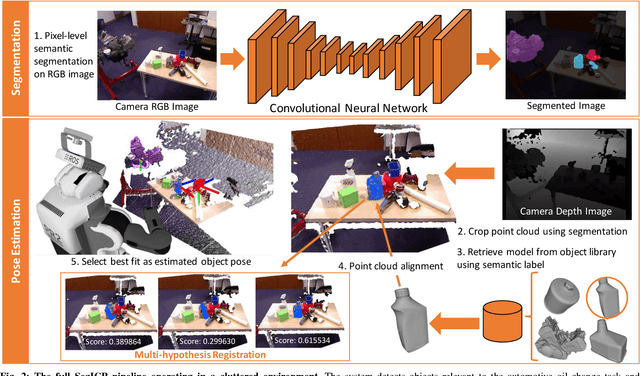

Recent robotic manipulation competitions have highlighted that sophisticated robots still struggle to achieve fast and reliable perception of task-relevant objects in complex, realistic scenarios. To improve these systems' perceptive speed and robustness, we present SegICP, a novel integrated solution to object recognition and pose estimation. SegICP couples convolutional neural networks and multi-hypothesis point cloud registration to achieve both robust pixel-wise semantic segmentation as well as accurate and real-time 6-DOF pose estimation for relevant objects. Our architecture achieves 1cm position error and <5^\circ$ angle error in real time without an initial seed. We evaluate and benchmark SegICP against an annotated dataset generated by motion capture.