Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProposal of algorithms for navigation and obstacles avoidance of autonomous mobile robot
Paper and Code
Nov 28, 2016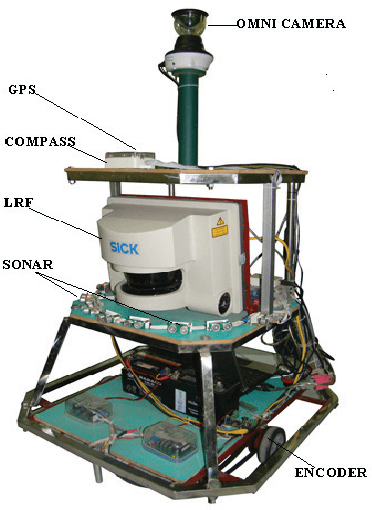
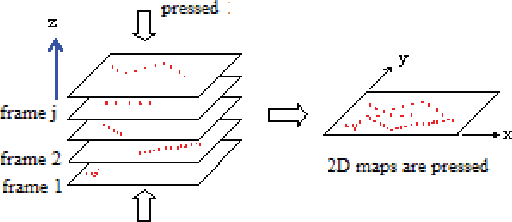
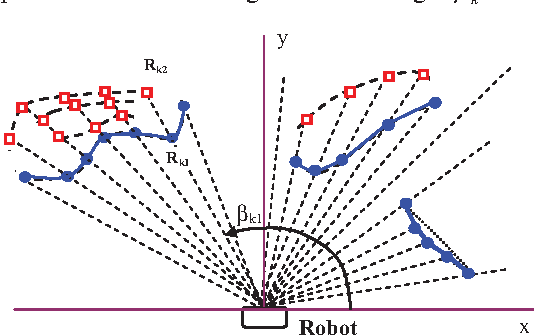
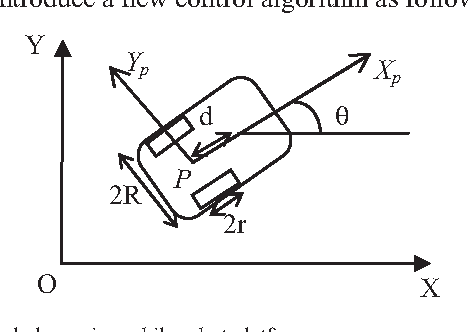
This paper presents algorithms to navigate and avoid obstacles for an in-door autonomous mobile robot. A laser range finder is used to obtain 3D images of the environment. A new algorithm, namely 3D-to-2D image pressure and barriers detection (IPaBD), is proposed to create a 2D global map from the 3D images. This map is basic to design the trajectory. A tracking controller is developed to control the robot to follow the trajectory. The obstacle avoidance is addressed with the use of sonar sensors. An improved vector field histogram (Improved-VFH) algorithm is presented with improvements to overcome some limitations of the original VFH. Experiments have been conducted and the result is encouraged.
* In 2013 8th IEEE Conference on Industrial Electronics and
Applications (ICIEA)
View paper on