 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximum Correntropy Unscented Filter
Paper and Code
Aug 26, 2016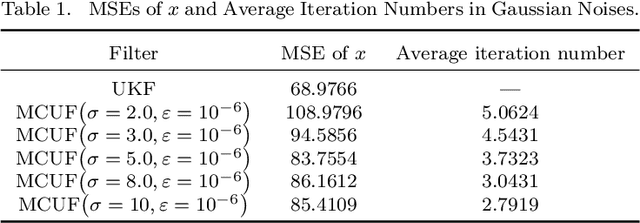
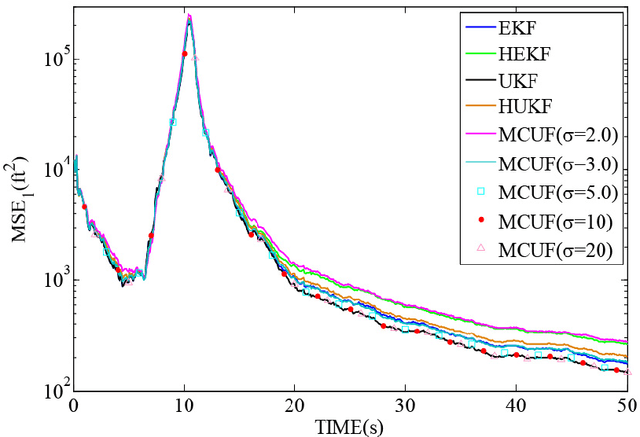
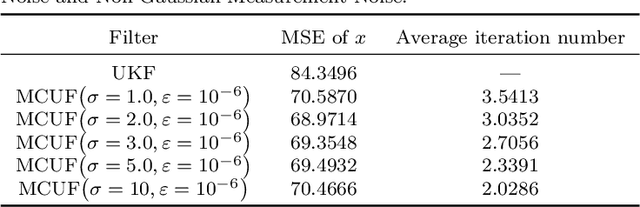
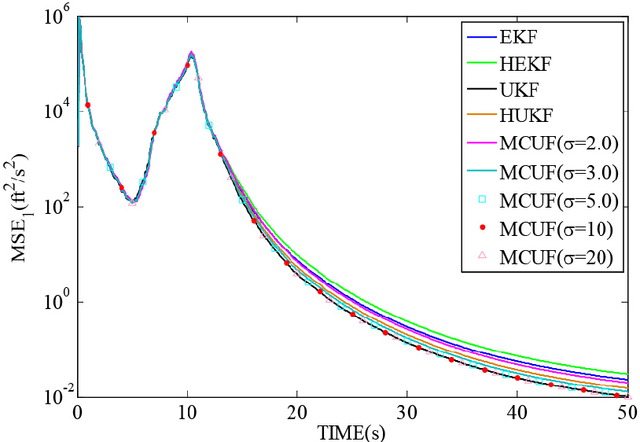
The unscented transformation (UT) is an efficient method to solve the state estimation problem for a non-linear dynamic system, utilizing a derivative-free higher-order approximation by approximating a Gaussian distribution rather than approximating a non-linear function. Applying the UT to a Kalman filter type estimator leads to the well-known unscented Kalman filter (UKF). Although the UKF works very well in Gaussian noises, its performance may deteriorate significantly when the noises are non-Gaussian, especially when the system is disturbed by some heavy-tailed impulsive noises. To improve the robustness of the UKF against impulsive noises, a new filter for nonlinear systems is proposed in this work, namely the maximum correntropy unscented filter (MCUF). In MCUF, the UT is applied to obtain the prior estimates of the state and covariance matrix, and a robust statistical linearization regression based on the maximum correntropy criterion (MCC) is then used to obtain the posterior estimates of the state and covariance. The satisfying performance of the new algorithm is confirmed by two illustrative examples.