 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sensorimotor Reinforcement Learning Framework for Physical Human-Robot Interaction
Paper and Code
Jul 27, 2016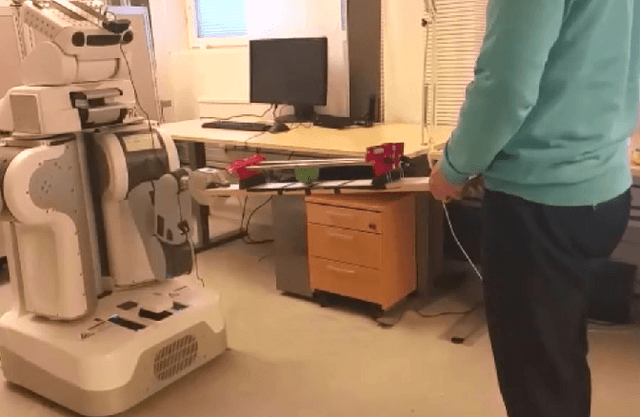
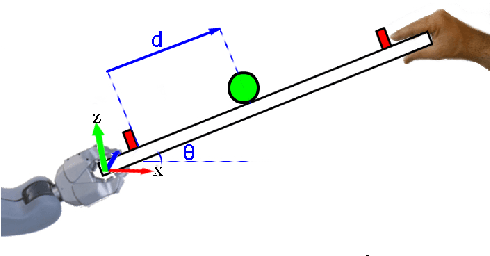
Modeling of physical human-robot collaborations is generally a challenging problem due to the unpredictive nature of human behavior. To address this issue, we present a data-efficient reinforcement learning framework which enables a robot to learn how to collaborate with a human partner. The robot learns the task from its own sensorimotor experiences in an unsupervised manner. The uncertainty of the human actions is modeled using Gaussian processes (GP) to implement action-value functions. Optimal action selection given the uncertain GP model is ensured by Bayesian optimization. We apply the framework to a scenario in which a human and a PR2 robot jointly control the ball position on a plank based on vision and force/torque data. Our experimental results show the suitability of the proposed method in terms of fast and data-efficient model learning, optimal action selection under uncertainties and equal role sharing between the partners.