Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimed Automata Approach for Motion Planning Using Metric Interval Temporal Logic
Paper and Code
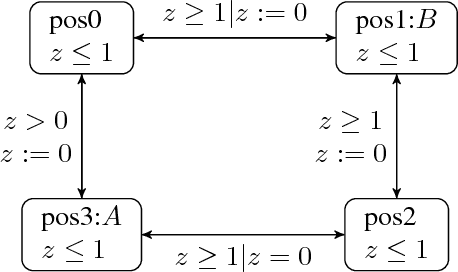
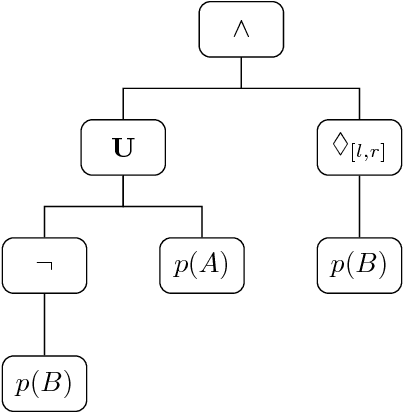
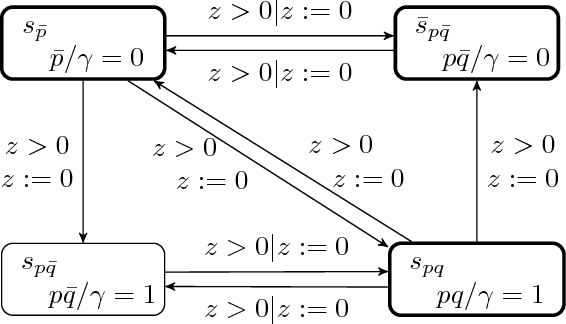
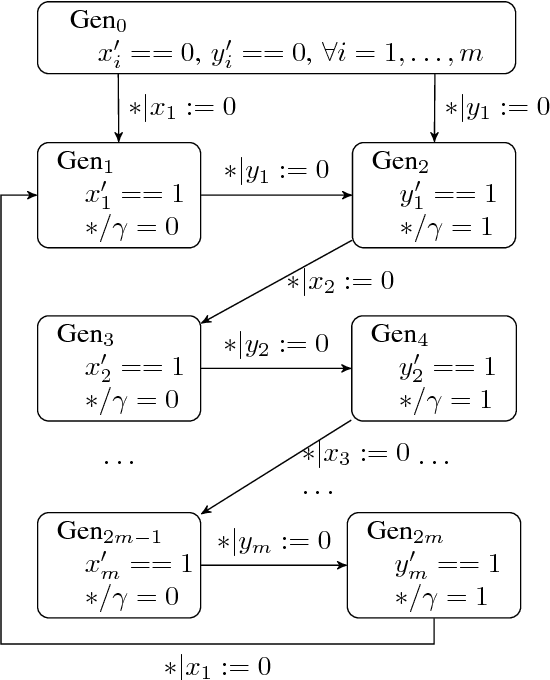
In this paper, we consider the robot motion (or task) planning problem under some given time bounded high level specifications. We use metric interval temporal logic (MITL), a member of the temporal logic family, to represent the task specification and then we provide a constructive way to generate a timed automaton and methods to look for accepting runs on the automaton to find a feasible motion (or path) sequence for the robot to complete the task.
* Full Version for ECC 2016
View paper on