 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-learning and adaptation in a sensorimotor framework
Paper and Code
Jan 05, 2016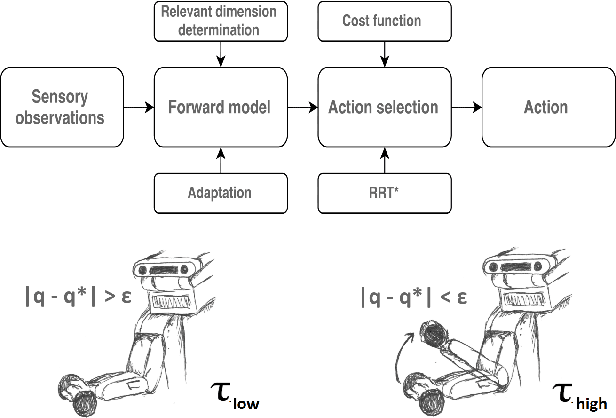
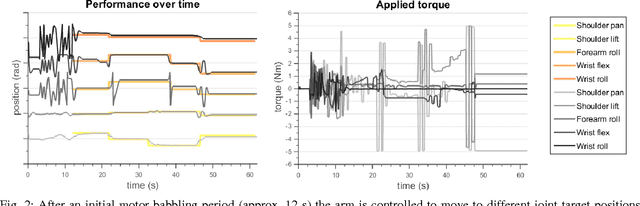
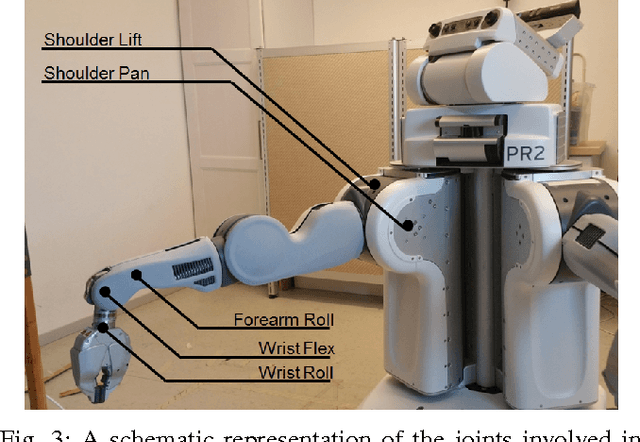
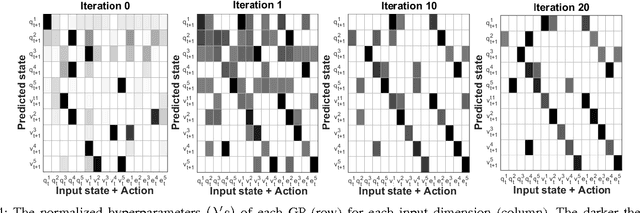
We present a general framework to autonomously achieve a task, where autonomy is acquired by learning sensorimotor patterns of a robot, while it is interacting with its environment. To accomplish the task, using the learned sensorimotor contingencies, our approach predicts a sequence of actions that will lead to the desirable observations. Gaussian processes (GP) with automatic relevance determination is used to learn the sensorimotor mapping. In this way, relevant sensory and motor components can be systematically found in high-dimensional sensory and motor spaces. We propose an incremental GP learning strategy, which discerns between situations, when an update or an adaptation must be implemented. RRT* is exploited to enable long-term planning and generating a sequence of states that lead to a given goal; while a gradient-based search finds the optimum action to steer to a neighbouring state in a single time step. Our experimental results prove the successfulness of the proposed framework to learn a joint space controller with high data dimensions (10$\times$15). It demonstrates short training phase (less than 12 seconds), real-time performance and rapid adaptations capabilities.