 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability and Performance Limits of Latency-Prone Distributed Feedback Controllers
Paper and Code
Jan 13, 2015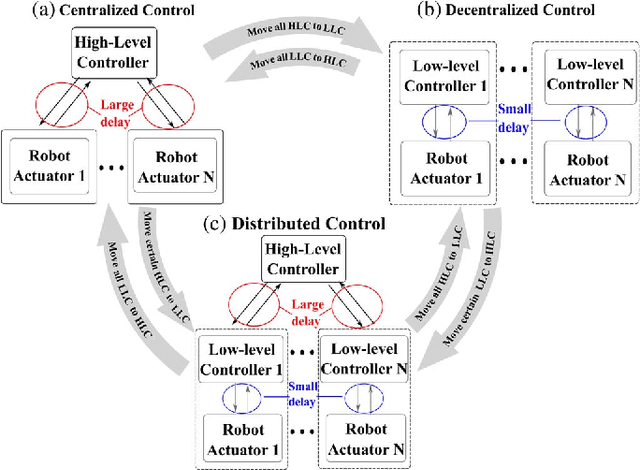
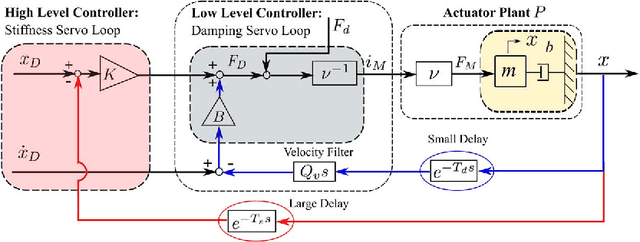
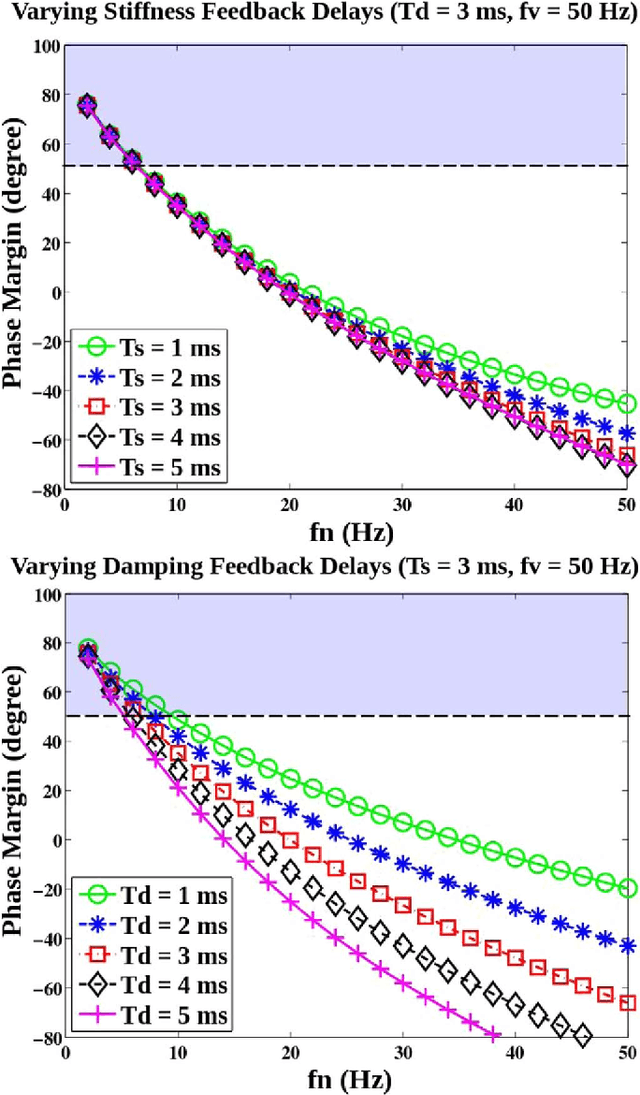
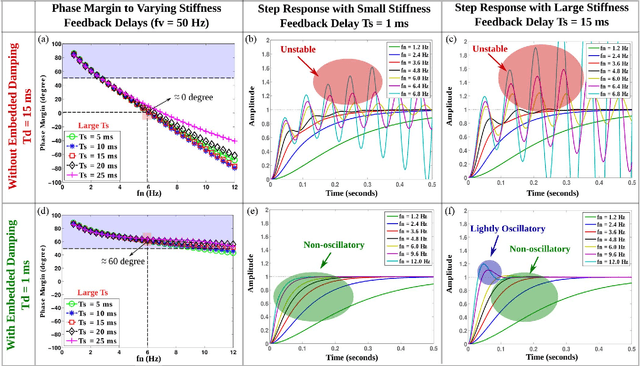
Robotic control systems are increasingly relying on distributed feedback controllers to tackle complex sensing and decision problems such as those found in highly articulated human-centered robots. These demands come at the cost of a growing computational burden and, as a result, larger controller latencies. To maximize robustness to mechanical disturbances by maximizing control feedback gains, this paper emphasizes the necessity for compromise between high- and low-level feedback control effort in distributed controllers. Specifically, the effect of distributed impedance controllers is studied where damping feedback effort is executed in close proximity to the control plant and stiffness feedback effort is executed in a latency-prone centralized control process. A central observation is that the stability of high impedance distributed controllers is very sensitive to damping feedback delay but much less to stiffness feedback delay. This study pursues a detailed analysis of this observation that leads to a physical understanding of the disparity. Then a practical controller breakdown gain rule is derived to aim at enabling control designers to consider the benefits of implementing their control applications in a distributed fashion. These considerations are further validated through the analysis, simulation and experimental testing on high performance actuators and on an omnidirectional mobile base.