 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Secondary Crash Likelihood Prediction Excluding Post Primary Crash Features
Feb 17, 2026Secondary crash likelihood prediction is a critical component of an active traffic management system to mitigate congestion and adverse impacts caused by secondary crashes. However, existing approaches mainly rely on post-crash features (e.g., crash type and severity) that are rarely available in real time, limiting their practical applicability. To address this limitation, we propose a hybrid secondary crash likelihood prediction framework that does not depend on post-crash features. A dynamic spatiotemporal window is designed to extract real-time traffic flow and environmental features from primary crash locations and their upstream segments. The framework includes three models: a primary crash model to estimate the likelihood of secondary crash occurrence, and two secondary crash models to evaluate traffic conditions at crash and upstream segments under different comparative scenarios. An ensemble learning strategy integrating six machine learning algorithms is developed to enhance predictive performance, and a voting-based mechanism combines the outputs of the three models. Experiments on Florida freeways demonstrate that the proposed hybrid framework correctly identifies 91% of secondary crashes with a low false alarm rate of 0.20. The Area Under the ROC Curve improves from 0.654, 0.744, and 0.902 for the individual models to 0.952 for the hybrid model, outperforming previous studies.
MMCAformer: Macro-Micro Cross-Attention Transformer for Traffic Speed Prediction with Microscopic Connected Vehicle Driving Behavior
Feb 17, 2026Accurate speed prediction is crucial for proactive traffic management to enhance traffic efficiency and safety. Existing studies have primarily relied on aggregated, macroscopic traffic flow data to predict future traffic trends, whereas road traffic dynamics are also influenced by individual, microscopic human driving behaviors. Recent Connected Vehicle (CV) data provide rich driving behavior features, offering new opportunities to incorporate these behavioral insights into speed prediction. To this end, we propose the Macro-Micro Cross-Attention Transformer (MMCAformer) to integrate CV data-based micro driving behavior features with macro traffic features for speed prediction. Specifically, MMCAformer employs self-attention to learn intrinsic dependencies in macro traffic flow and cross-attention to capture spatiotemporal interplays between macro traffic status and micro driving behavior. MMCAformer is optimized with a Student-t negative log-likelihood loss to provide point-wise speed prediction and estimate uncertainty. Experiments on four Florida freeways demonstrate the superior performance of the proposed MMCAformer compared to baselines. Compared with only using macro features, introducing micro driving behavior features not only enhances prediction accuracy (e.g., overall RMSE, MAE, and MAPE reduced by 9.0%, 6.9%, and 10.2%, respectively) but also shrinks model prediction uncertainty (e.g., mean predictive intervals decreased by 10.1-24.0% across the four freeways). Results reveal that hard braking and acceleration frequencies emerge as the most influential features. Such improvements are more pronounced under congested, low-speed traffic conditions.
inTformer: A Time-Embedded Attention-Based Transformer for Crash Likelihood Prediction at Intersections Using Connected Vehicle Data
Jul 13, 2023The real-time crash likelihood prediction model is an essential component of the proactive traffic safety management system. Over the years, numerous studies have attempted to construct a crash likelihood prediction model in order to enhance traffic safety, but mostly on freeways. In the majority of the existing studies, researchers have primarily employed a deep learning-based framework to identify crash potential. Lately, Transformer has emerged as a potential deep neural network that fundamentally operates through attention-based mechanisms. Transformer has several functional benefits over extant deep learning models such as Long Short-Term Memory (LSTM), Convolution Neural Network (CNN), etc. Firstly, Transformer can readily handle long-term dependencies in a data sequence. Secondly, Transformers can parallelly process all elements in a data sequence during training. Finally, a Transformer does not have the vanishing gradient issue. Realizing the immense possibility of Transformers, this paper proposes inTersection-Transformer (inTformer), a time-embedded attention-based Transformer model that can effectively predict intersection crash likelihood in real-time. The proposed model was evaluated using connected vehicle data extracted from INRIX and Center for Advanced Transportation Technology (CATT) Lab's Signal Analytics Platform. The data was parallelly formatted and stacked at different timesteps to develop nine inTformer models. The best inTformer model achieved a sensitivity of 73%. This model was also compared to earlier studies on crash likelihood prediction at intersections and with several established deep learning models trained on the same connected vehicle dataset. In every scenario, this inTformer outperformed the benchmark models confirming the viability of the proposed inTformer architecture.
Using Connected Vehicle Trajectory Data to Evaluate the Effects of Speeding
Mar 29, 2023



Speeding has been and continues to be a major contributing factor to traffic fatalities. Various transportation agencies have proposed speed management strategies to reduce the amount of speeding on arterials. While there have been various studies done on the analysis of speeding proportions above the speed limit, few studies have considered the effect on the individual's journey. Many studies utilized speed data from detectors, which is limited in that there is no information of the route that the driver took. This study aims to explore the effects of various roadway features an individual experiences for a given journey on speeding proportions. Connected vehicle trajectory data was utilized to identify the path that a driver took, along with the vehicle related variables. The level of speeding proportion is predicted using multiple learning models. The model with the best performance, Extreme Gradient Boosting, achieved an accuracy of 0.756. The proposed model can be used to understand how the environment and vehicle's path effects the drivers' speeding behavior, as well as predict the areas with high levels of speeding proportions. The results suggested that features related to an individual driver's trip, i.e., total travel time, has a significant contribution towards speeding. Features that are related to the environment of the individual driver's trip, i.e., proportion of residential area, also had a significant effect on reducing speeding proportions. It is expected that the findings could help inform transportation agencies more on the factors related to speeding for an individual driver's trip.
Towards Next Generation of Pedestrian and Connected Vehicle In-the-loop Research: A Digital Twin Simulation Framework
Dec 08, 2022



Digital Twin is an emerging technology that replicates real-world entities into a digital space. It has attracted increasing attention in the transportation field and many researchers are exploring its future applications in the development of Intelligent Transportation System (ITS) technologies. Connected vehicles (CVs) and pedestrians are among the major traffic participants in ITS. However, the usage of Digital Twin in research involving both CV and pedestrian remains largely unexplored. In this study, a Digital Twin framework for CV and pedestrian in-the-loop simulation is proposed. The proposed framework consists of the physical world, the digital world, and data transmission in between. The features for the entities (CV and pedestrian) that need digital twined are divided into external state and internal state, and the attributes in each state are described. We also demonstrate a sample architecture under the proposed Digital Twin framework, which is based on Carla-Sumo Co-simulation and Cave automatic virtual environment (CAVE). The proposed framework is expected to provide guidance to the future Digital Twin research, and the architecture we build can serve as the testbed for further research and development of ITS applications on CV and pedestrian.
Deep Convolutional Neural Network for Roadway Incident Surveillance Using Audio Data
Mar 09, 2022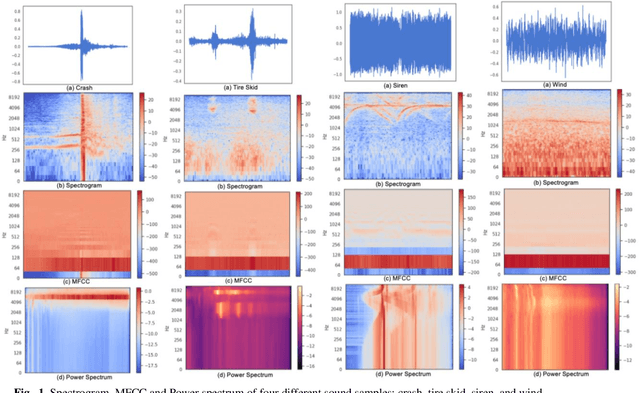
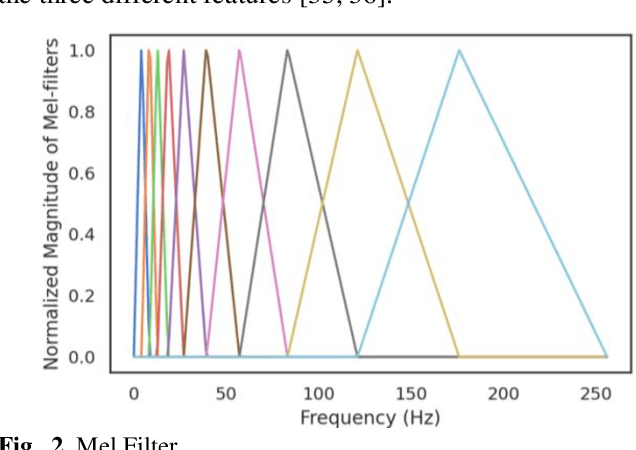
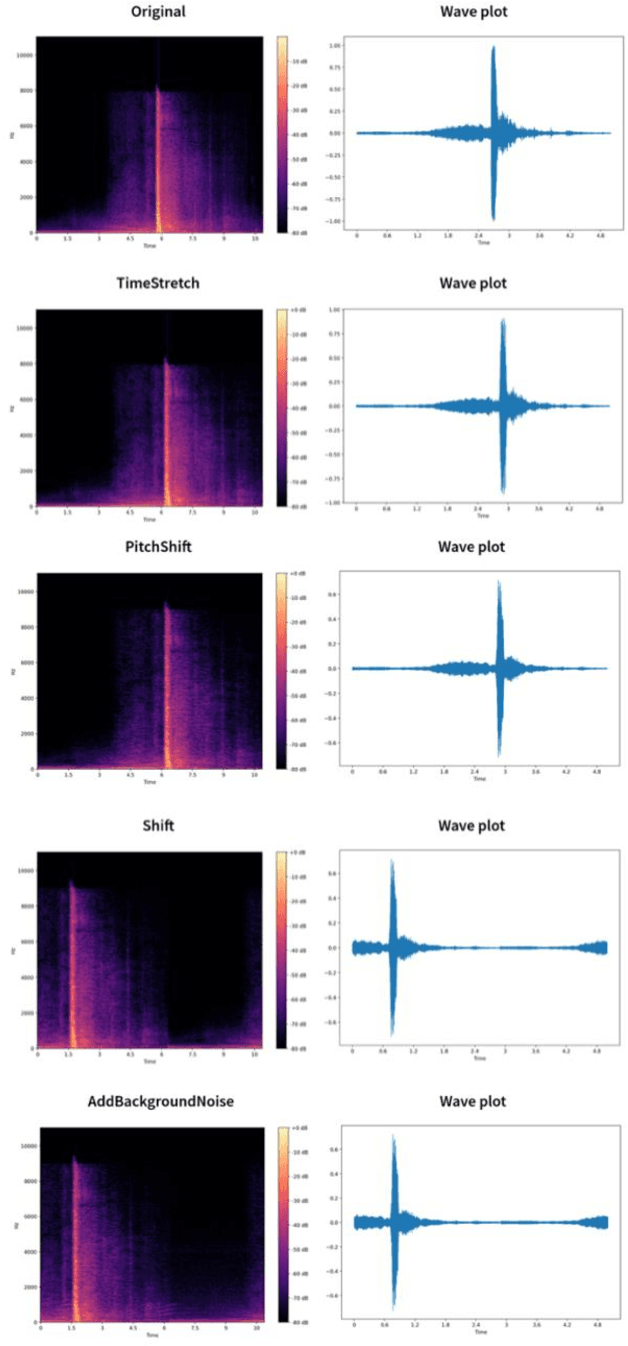
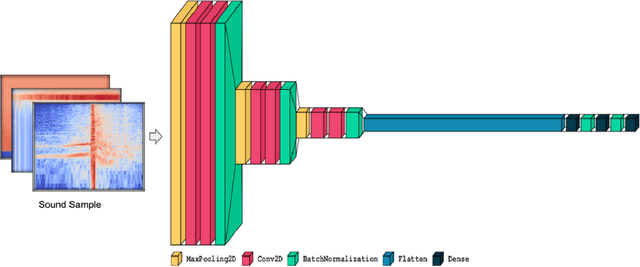
Crash events identification and prediction plays a vital role in understanding safety conditions for transportation systems. While existing systems use traffic parameters correlated with crash data to classify and train these models, we propose the use of a novel sensory unit that can also accurately identify crash events: microphone. Audio events can be collected and analyzed to classify events such as crash. In this paper, we have demonstrated the use of a deep Convolutional Neural Network (CNN) for road event classification. Important audio parameters such as Mel Frequency Cepstral Coefficients (MFCC), log Mel-filterbank energy spectrum and Fourier Spectrum were used as feature set. Additionally, the dataset was augmented with more sample data by the use of audio augmentation techniques such as time and pitch shifting. Together with the feature extraction this data augmentation can achieve reasonable accuracy. Four events such as crash, tire skid, horn and siren sounds can be accurately identified giving indication of a road hazard that can be useful for traffic operators or paramedics. The proposed methodology can reach accuracy up to 94%. Such audio systems can be implemented as a part of an Internet of Things (IoT) platform that can complement video-based sensors without complete coverage.
Real-time Emergency Vehicle Event Detection Using Audio Data
Feb 03, 2022



In this work, we focus on detecting emergency vehicles using only audio data. Improved and quick detection can help in faster preemption of these vehicles at signalized intersections thereby reducing overall response time in case of emergencies. Important audio features were extracted from raw data and passed into extreme learning machines (ELM) for training. ELMs have been used in this work because of its simplicity and shorter run-time which can therefore be used for online learning. Recently, there have been many studies that focus on sound classification but most of the methods used are complex to train and implement. The results from this paper show that ELM can achieve similar performance with exceptionally shorter training times. The accuracy reported for ELM is about 97% for emergency vehicle detection (EVD).