 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Kalman Filter with Ultimately Accurate Fused Measurement Covariance
Apr 11, 2025This paper investigates the distributed Kalman filter (DKF) for linear systems, with specific attention on measurement fusion, which is a typical way of information sharing and is vital for enhancing stability and improving estimation accuracy. We show that it is the mismatch between the fused measurement and the fused covariance that leads to performance degradation or inconsistency in previous consensus-based DKF algorithms. To address this issue, we introduce two fully distributed approaches for calculating the exact covariance of the fused measurements, building upon which the modified DKF algorithms are proposed. Moreover, the performance analysis of the modified algorithms is also provided under rather mild conditions, including the steady-state value of the estimation error covariance. We also show that due to the guaranteed consistency in the modified DKF algorithms, the steady-state estimation accuracy is significantly improved compared to classical DKF algorithms. Numerical experiments are carried out to validate the theoretical analysis and show the advantages of the proposed methods.
Deficient Excitation in Parameter Learning
Mar 04, 2025



This paper investigates parameter learning problems under deficient excitation (DE). The DE condition is a rank-deficient, and therefore, a more general evolution of the well-known persistent excitation condition. Under the DE condition, a proposed online algorithm is able to calculate the identifiable and non-identifiable subspaces, and finally give an optimal parameter estimate in the sense of least squares. In particular, the learning error within the identifiable subspace exponentially converges to zero in the noise-free case, even without persistent excitation. The DE condition also provides a new perspective for solving distributed parameter learning problems, where the challenge is posed by local regressors that are often insufficiently excited. To improve knowledge of the unknown parameters, a cooperative learning protocol is proposed for a group of estimators that collect measured information under complementary DE conditions. This protocol allows each local estimator to operate locally in its identifiable subspace, and reach a consensus with neighbours in its non-identifiable subspace. As a result, the task of estimating unknown parameters can be achieved in a distributed way using cooperative local estimators. Application examples in system identification are given to demonstrate the effectiveness of the theoretical results developed in this paper.
Observation of Periodic Systems: Bridge Centralized Kalman Filtering and Consensus-Based Distributed Filtering
Mar 15, 2023Compared with linear time invariant systems, linear periodic system can describe the periodic processes arising from nature and engineering more precisely. However, the time-varying system parameters increase the difficulty of the research on periodic system, such as stabilization and observation. This paper aims to consider the observation problem of periodic systems by bridging two fundamental filtering algorithms for periodic systems with a sensor network: consensus-on-measurement-based distributed filtering (CMDF) and centralized Kalman filtering (CKF). Firstly, one mild convergence condition based on uniformly collective observability is established for CMDF, under which the filtering performance of CMDF can be formulated as a symmetric periodic positive semidefinite (SPPS) solution to a discrete-time periodic Lyapunov equation. Then, the closed form of the performance gap between CMDF and CKF is presented in terms of the information fusion steps and the consensus weights of the network. Moreover, it is pointed out that the estimation error covariance of CMDF exponentially converges to the centralized one with the fusion steps tending to infinity. Altogether, these new results establish a concise and specific relationship between distributed and centralized filterings, and formulate the trade-off between the communication cost and distributed filtering performance on periodic systems. Finally, the theoretical results are verified with numerical experiments.
Harmonic-Copuled Riccati Equations and its Applications in Distributed Filtering
Nov 21, 2022



The coupled Riccati equations are cosisted of multiple Riccati-like equations with solutions coupled with each other, which can be applied to depict the properties of more complex systems such as markovian systems or multi-agent systems. This paper manages to formulate and investigate a new kind of coupled Riccati equations, called harmonic-coupled Riccati equations (HCRE), from the matrix iterative law of the consensus on information-based distributed filtering (CIDF) algortihm proposed in [1], where the solutions of the equations are coupled with harmonic means. Firstly, mild conditions of the existence and uniqueness of the solution to HCRE are induced with collective observability and primitiviness of weighting matrix. Then, it is proved that the matrix iterative law of CIDF will converge to the unique solution of the corresponding HCRE, hence can be used to obtain the solution to HCRE. Moreover, through applying the novel theory of HCRE, it is pointed out that the real estimation error covariance of CIDF will also become steady-state and the convergent value is simplified as the solution to a discrete time Lyapunov equation (DLE). Altogether, these new results develop the theory of the coupled Riccati equations, and provide a novel perspective on the performance analysis of CIDF algorithm, which sufficiently reduces the conservativeness of the evaluation techniques in the literature. Finally, the theoretical results are verified with numerical experiments.
DiscreteCommunication and ControlUpdating in Event-Triggered Consensus
Oct 26, 2022



This paper studies the consensus control problem faced with three essential demands, namely, discrete control updating for each agent, discrete-time communications among neighboring agents, and the fully distributed fashion of the controller implementation without requiring any global information of the whole network topology. Noting that the existing related results only meeting one or two demands at most are essentially not applicable, in this paper we establish a novel framework to solve the problem of fully distributed consensus with discrete communication and control. The first key point in this framework is the design of controllers that are only updated at discrete event instants and do not depend on global information by introducing time-varying gains inspired by the adaptive control technique. Another key point is the invention of novel dynamic triggering functions that are independent of relative information among neighboring agents. Under the established framework, we propose fully distributed state-feedback event-triggered protocols for undirected graphs and also further study the more complexed cases of output-feedback control and directed graphs. Finally, numerical examples are provided to verify the effectiveness of the proposed event-triggered protocols.
Stochastic Event-triggered Variational Bayesian Filtering
Jun 14, 2022
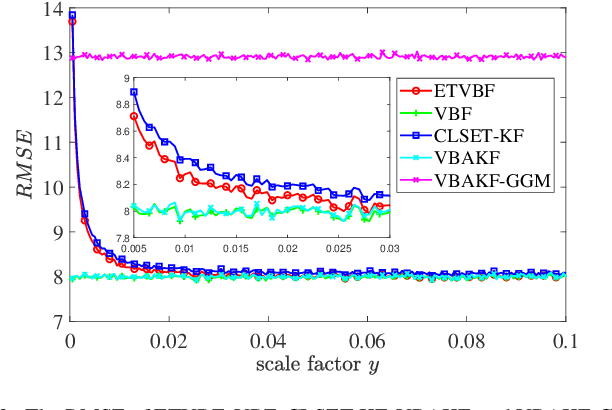
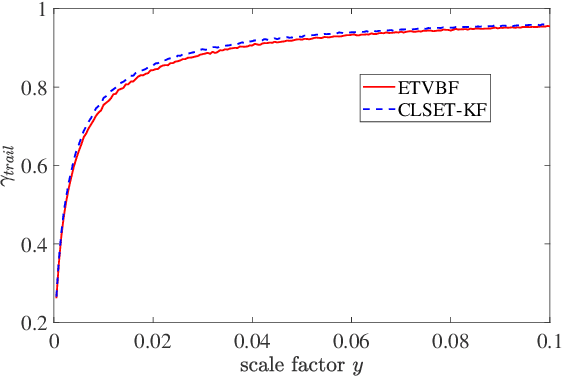
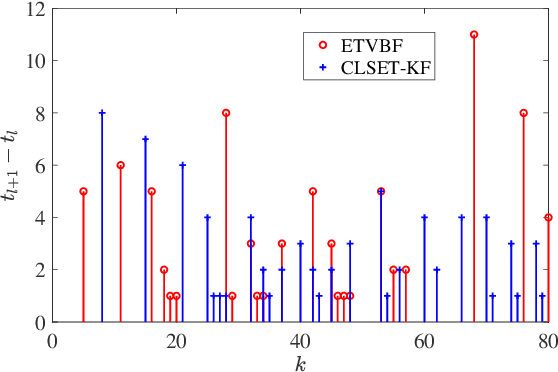
This paper proposes an event-triggered variational Bayesian filter for remote state estimation with unknown and time-varying noise covariances. After presetting multiple nominal process noise covariances and an initial measurement noise covariance, a variational Bayesian method and a fixed-point iteration method are utilized to jointly estimate the posterior state vector and the unknown noise covariances under a stochastic event-triggered mechanism. The proposed algorithm ensures low communication loads and excellent estimation performances for a wide range of unknown noise covariances. Finally, the performance of the proposed algorithm is demonstrated by tracking simulations of a vehicle.