 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll-in-One: A DRL-based Control Switch Combining State-of-the-art Navigation Planners
Sep 23, 2021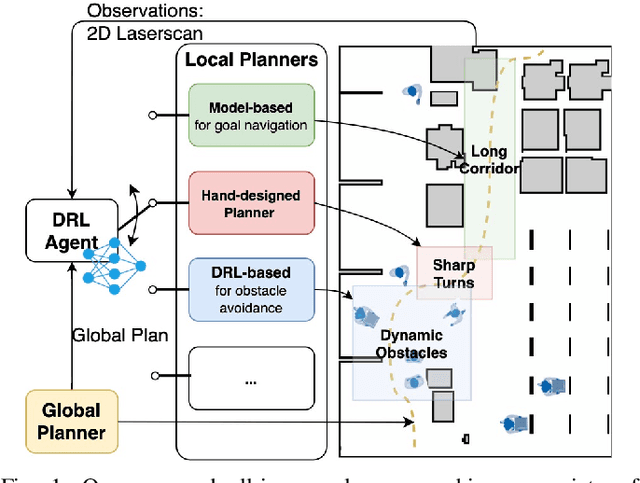
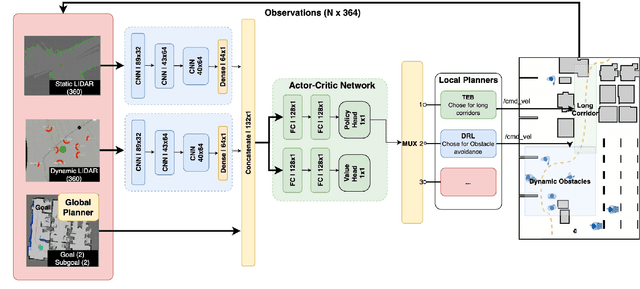
Autonomous navigation of mobile robots is an essential aspect in use cases such as delivery, assistance or logistics. Although traditional planning methods are well integrated into existing navigation systems, they struggle in highly dynamic environments. On the other hand, Deep-Reinforcement-Learning-based methods show superior performance in dynamic obstacle avoidance but are not suitable for long-range navigation and struggle with local minima. In this paper, we propose a Deep-Reinforcement-Learning-based control switch, which has the ability to select between different planning paradigms based solely on sensor data observations. Therefore, we develop an interface to efficiently operate multiple model-based, as well as learning-based local planners and integrate a variety of state-of-the-art planners to be selected by the control switch. Subsequently, we evaluate our approach against each planner individually and found improvements in navigation performance especially for highly dynamic scenarios. Our planner was able to prefer learning-based approaches in situations with a high number of obstacles while relying on the traditional model-based planners in long corridors or empty spaces.
Connecting Deep-Reinforcement-Learning-based Obstacle Avoidance with Conventional Global Planners using Waypoint Generators
Apr 08, 2021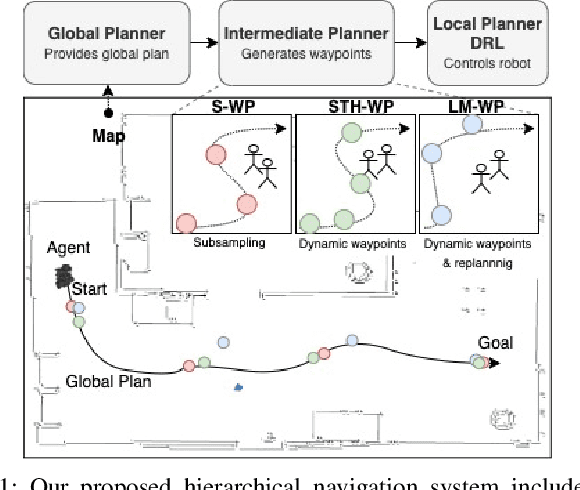
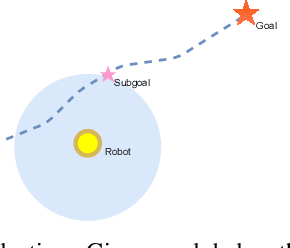
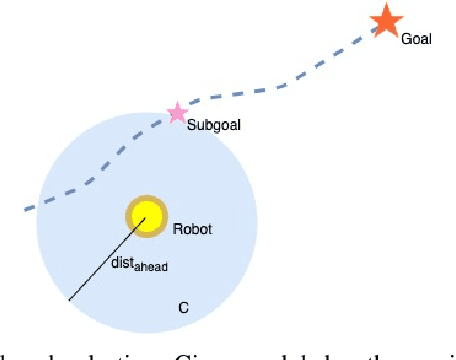
Deep Reinforcement Learning has emerged as an efficient dynamic obstacle avoidance method in highly dynamic environments. It has the potential to replace overly conservative or inefficient navigation approaches. However, the integration of Deep Reinforcement Learning into existing navigation systems is still an open frontier due to the myopic nature of Deep-Reinforcement-Learning-based navigation, which hinders its widespread integration into current navigation systems. In this paper, we propose the concept of an intermediate planner to interconnect novel Deep-Reinforcement-Learning-based obstacle avoidance with conventional global planning methods using waypoint generation. Therefore, we integrate different waypoint generators into existing navigation systems and compare the joint system against traditional ones. We found an increased performance in terms of safety, efficiency and path smoothness especially in highly dynamic environments.
Towards Deployment of Deep-Reinforcement-Learning-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems
Apr 08, 2021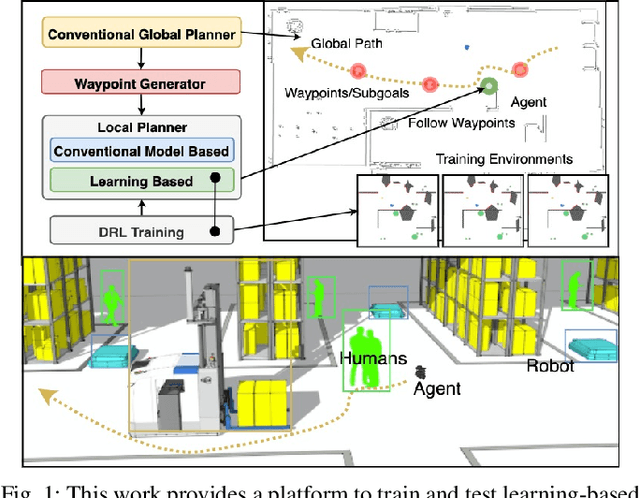
Recently, mobile robots have become important tools in various industries, especially in logistics. Deep reinforcement learning emerged as an alternative planning method to replace overly conservative approaches and promises more efficient and flexible navigation. However, deep reinforcement learning approaches are not suitable for long-range navigation due to their proneness to local minima and lack of long term memory, which hinders its widespread integration into industrial applications of mobile robotics. In this paper, we propose a navigation system incorporating deep-reinforcement-learning-based local planners into conventional navigation stacks for long-range navigation. Therefore, a framework for training and testing the deep reinforcement learning algorithms along with classic approaches is presented. We evaluated our deep-reinforcement-learning-enhanced navigation system against various conventional planners and found that our system outperforms them in terms of safety, efficiency and robustness.