 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying the biophysical properties of stomatocytes in health and disease
Jun 02, 2026Hereditary stomatocytosis (HS) comprises red blood cell (RBC) disorders characterized by cup-shaped erythrocytes that respond oppositely to splenectomy: curative in overhydrated HS (OHS) but potentially thrombogenic in dehydrated HS (DHS/xerocytosis). This paradox persists because RBC biomechanics is governed by partly independent parameters--shear modulus, bending rigidity, surface-to-volume ratio (S/V), and cytoplasmic viscosity--that existing assays capture only piecemeal. Here we combine dissipative particle dynamics (DPD) simulations with microfluidic imaging to construct a control discocyte and three stomatocyte models (ST-RBC1-3) at fixed membrane area and decreasing volume (109.7, 101.5, 89.8 fL), spanning the OHS-to-DHS range. Tracing this parameter set through five mechanically orthogonal assays, we find that interendothelial-slit (IES) traversal is geometry-dominated: overhydrated ST-RBC1 requires an order of magnitude higher critical pressure than healthy RBCs, whereas dehydrated ST-RBC3 passes freely. ST-RBC3 nonetheless suppresses membrane tank-treading and raises low-shear whole-blood viscosity by ~29% at physiological haematocrit, comparable to Gaucher-disease hyperviscosity. A funnel-obstacle chip amplifies these differences into a label-free centerline-offset signal predicted to separate all four RBC types (~4.5 standard deviations between extreme phenotypes). These results unite single-cell mechanics, splenic filtration, and hemorheology in one framework, resolve the splenectomy paradox, and point toward microfluidic pre-operative risk stratification in HS.
Deep reinforcement learning with a particle dynamics environment applied to emergency evacuation of a room with obstacles
Nov 30, 2020
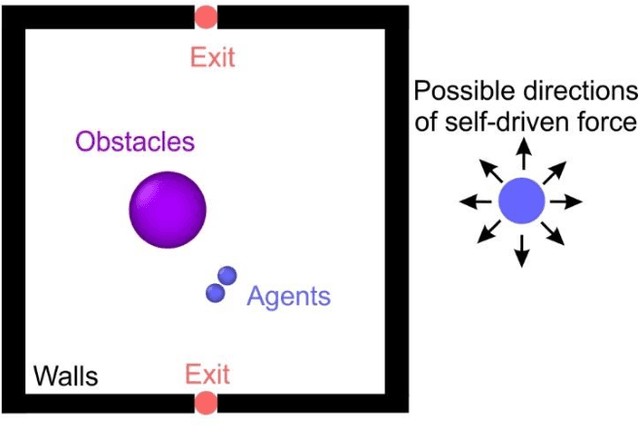
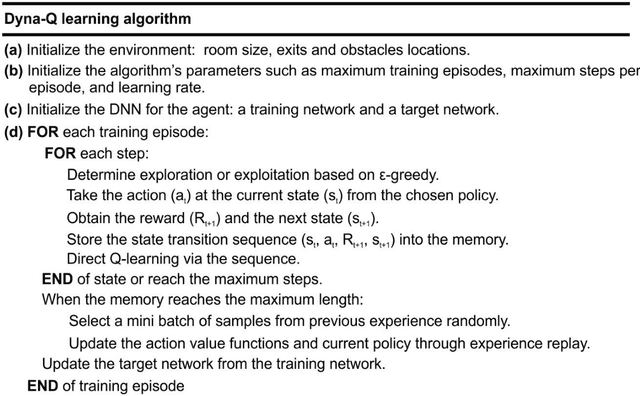
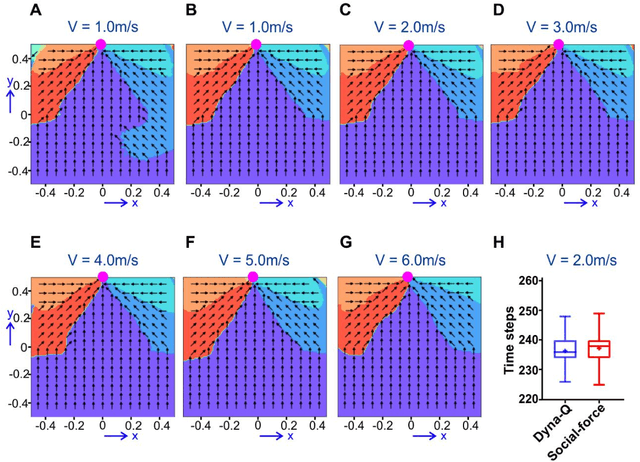
A very successful model for simulating emergency evacuation is the social-force model. At the heart of the model is the self-driven force that is applied to an agent and is directed towards the exit. However, it is not clear if the application of this force results in optimal evacuation, especially in complex environments with obstacles. Here, we develop a deep reinforcement learning algorithm in association with the social force model to train agents to find the fastest evacuation path. During training, we penalize every step of an agent in the room and give zero reward at the exit. We adopt the Dyna-Q learning approach. We first show that in the case of a room without obstacles the resulting self-driven force points directly towards the exit as in the social force model and that the median exit time intervals calculated using the two methods are not significantly different. Then, we investigate evacuation of a room with one obstacle and one exit. We show that our method produces similar results with the social force model when the obstacle is convex. However, in the case of concave obstacles, which sometimes can act as traps for agents governed purely by the social force model and prohibit complete room evacuation, our approach is clearly advantageous since it derives a policy that results in object avoidance and complete room evacuation without additional assumptions. We also study evacuation of a room with multiple exits. We show that agents are able to evacuate efficiently from the nearest exit through a shared network trained for a single agent. Finally, we test the robustness of the Dyna-Q learning approach in a complex environment with multiple exits and obstacles. Overall, we show that our model can efficiently simulate emergency evacuation in complex environments with multiple room exits and obstacles where it is difficult to obtain an intuitive rule for fast evacuation.