 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of 1st Workshop on Advancing Artificial Intelligence through Theory of Mind
Apr 28, 2025



This volume includes a selection of papers presented at the Workshop on Advancing Artificial Intelligence through Theory of Mind held at AAAI 2025 in Philadelphia US on 3rd March 2025. The purpose of this volume is to provide an open access and curated anthology for the ToM and AI research community.
Dream to Explore: Adaptive Simulations for Autonomous Systems
Oct 27, 2021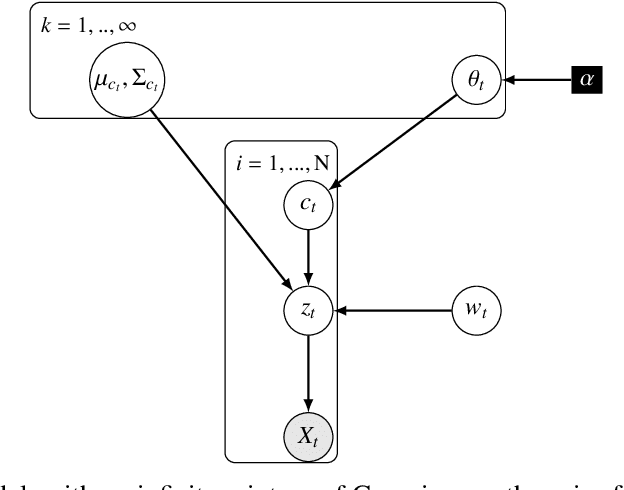
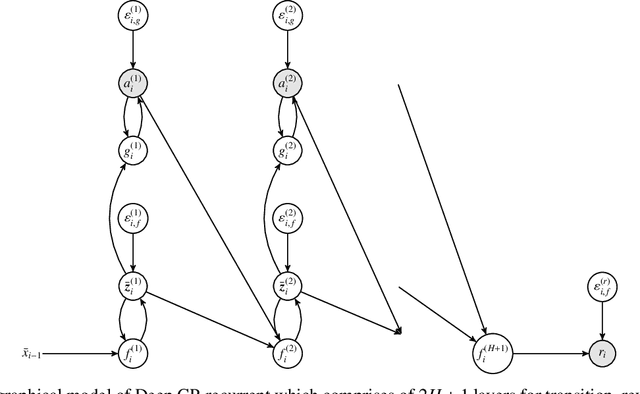
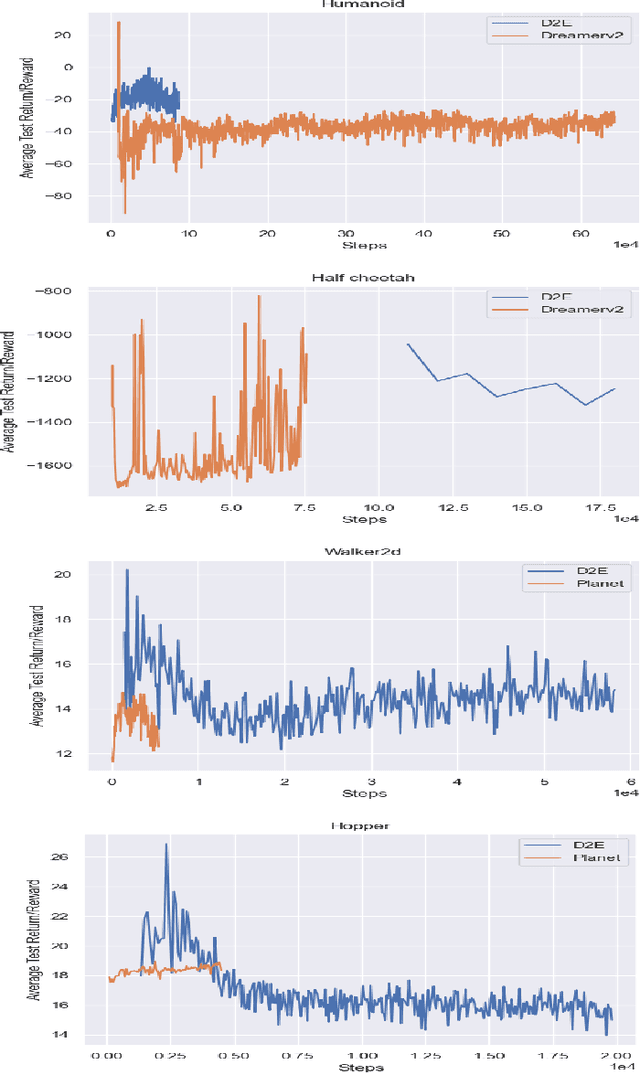
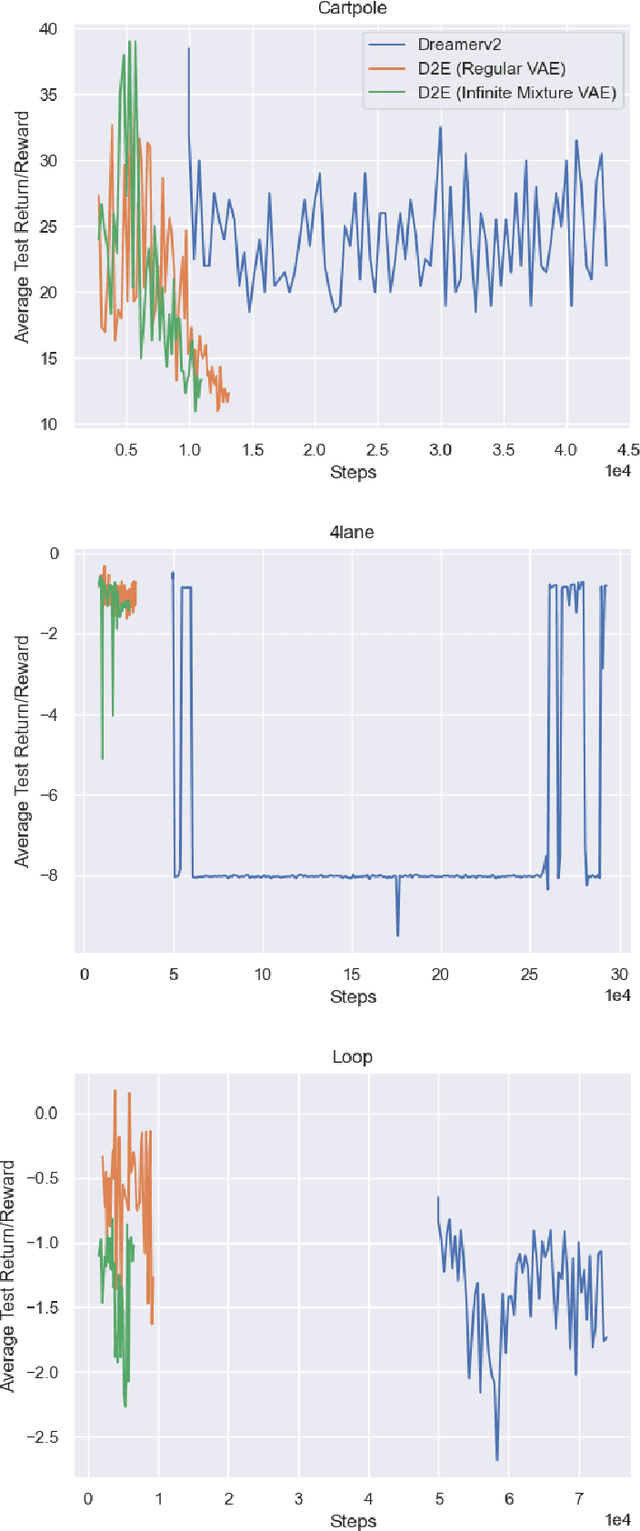
One's ability to learn a generative model of the world without supervision depends on the extent to which one can construct abstract knowledge representations that generalize across experiences. To this end, capturing an accurate statistical structure from observational data provides useful inductive biases that can be transferred to novel environments. Here, we tackle the problem of learning to control dynamical systems by applying Bayesian nonparametric methods, which is applied to solve visual servoing tasks. This is accomplished by first learning a state space representation, then inferring environmental dynamics and improving the policies through imagined future trajectories. Bayesian nonparametric models provide automatic model adaptation, which not only combats underfitting and overfitting, but also allows the model's unbounded dimension to be both flexible and computationally tractable. By employing Gaussian processes to discover latent world dynamics, we mitigate common data efficiency issues observed in reinforcement learning and avoid introducing explicit model bias by describing the system's dynamics. Our algorithm jointly learns a world model and policy by optimizing a variational lower bound of a log-likelihood with respect to the expected free energy minimization objective function. Finally, we compare the performance of our model with the state-of-the-art alternatives for continuous control tasks in simulated environments.