 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task Reinforcement Learning based Mobile Manipulation Control for Dynamic Object Tracking and Grasping
Jun 07, 2020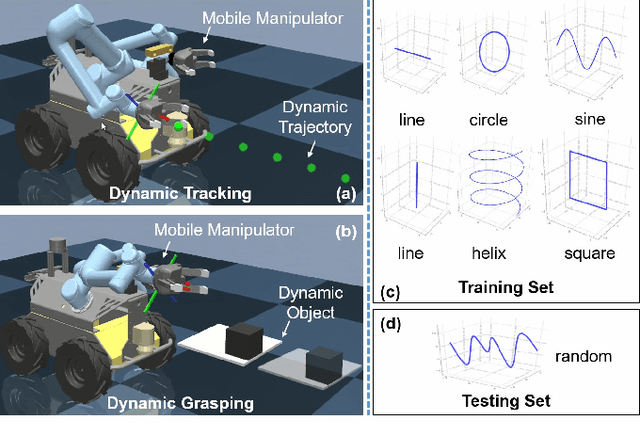
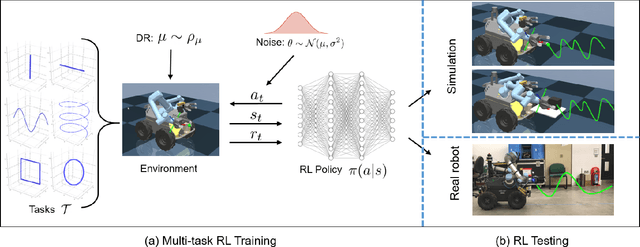
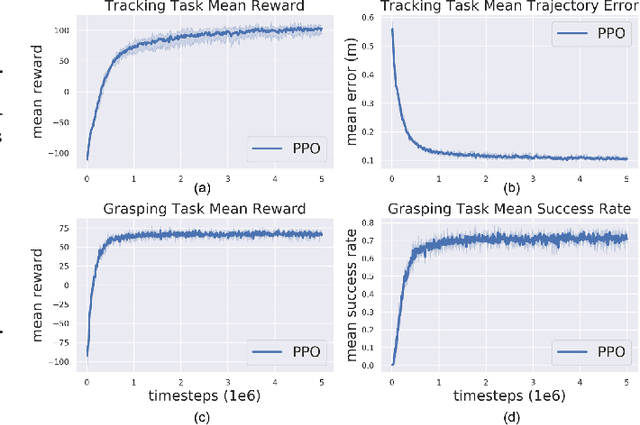
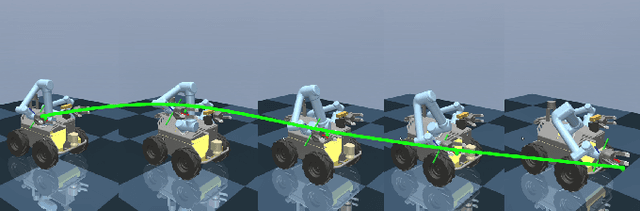
Agile control of mobile manipulator is challenging because of the high complexity coupled by the robotic system and the unstructured working environment. Tracking and grasping a dynamic object with a random trajectory is even harder. In this paper, a multi-task reinforcement learning-based mobile manipulation control framework is proposed to achieve general dynamic object tracking and grasping. Several basic types of dynamic trajectories are chosen as the task training set. To improve the policy generalization in practice, random noise and dynamics randomization are introduced during the training process. Extensive experiments show that our policy trained can adapt to unseen random dynamic trajectories with about 0.1m tracking error and 75\% grasping success rate of dynamic objects. The trained policy can also be successfully deployed on a real mobile manipulator.
Online Mapping and Motion Planning under Uncertainty for Safe Navigation in Unknown Environments
May 26, 2020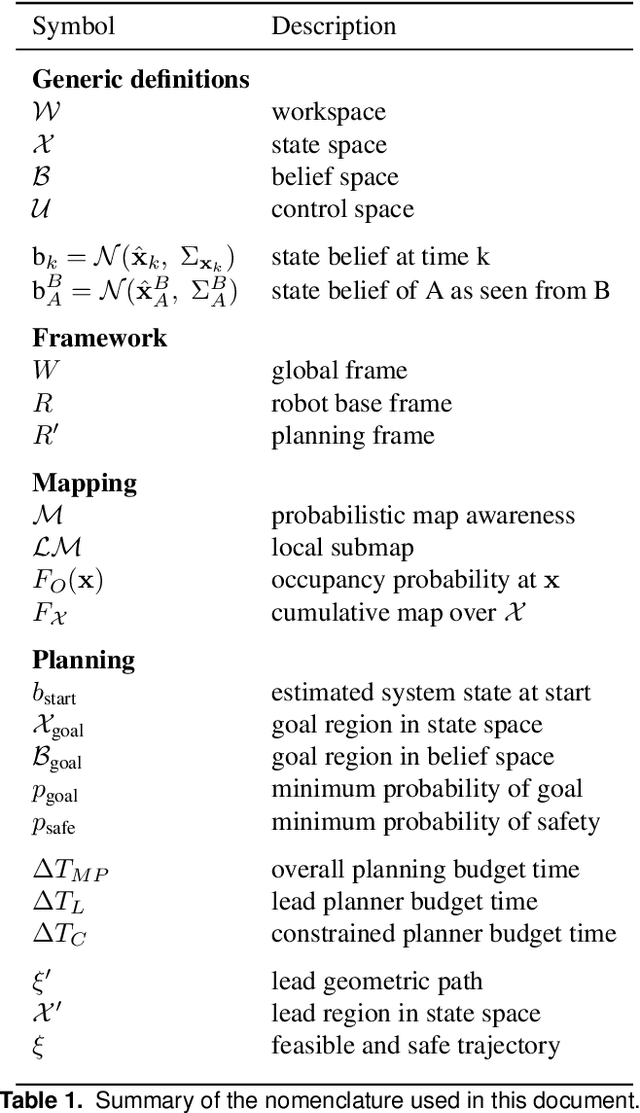
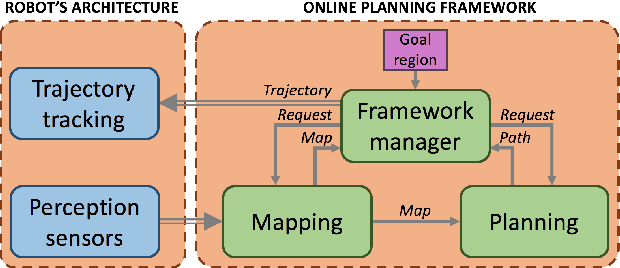
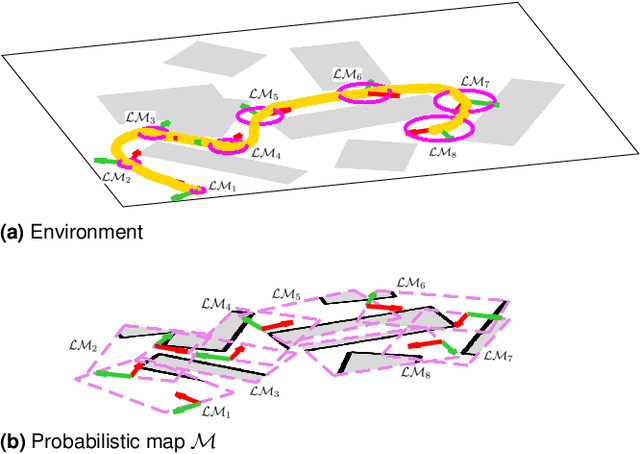
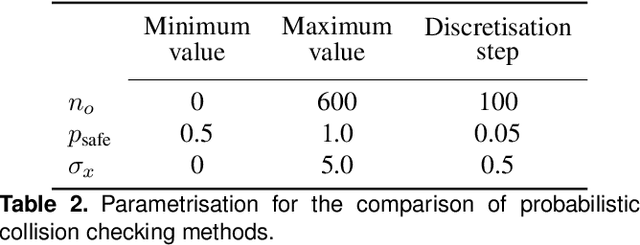
Safe autonomous navigation is an essential and challenging problem for robots operating in highly unstructured or completely unknown environments. Under these conditions, not only robotic systems must deal with limited localisation information, but also their manoeuvrability is constrained by their dynamics and often suffer from uncertainty. In order to cope with these constraints, this manuscript proposes an uncertainty-based framework for mapping and planning feasible motions online with probabilistic safety-guarantees. The proposed approach deals with the motion, probabilistic safety, and online computation constraints by: (i) incrementally mapping the surroundings to build an uncertainty-aware representation of the environment, and (ii) iteratively (re)planning trajectories to goal that are kinodynamically feasible and probabilistically safe through a multi-layered sampling-based planner in the belief space. In-depth empirical analyses illustrate some important properties of this approach, namely, (a) the multi-layered planning strategy enables rapid exploration of the high-dimensional belief space while preserving asymptotic optimality and completeness guarantees, and (b) the proposed routine for probabilistic collision checking results in tighter probability bounds in comparison to other uncertainty-aware planners in the literature. Furthermore, real-world in-water experimental evaluation on a non-holonomic torpedo-shaped autonomous underwater vehicle and simulated trials in the Stairwell scenario of the DARPA Subterranean Challenge 2019 on a quadrotor unmanned aerial vehicle demonstrate the efficacy of the method as well as its suitability for systems with limited on-board computational power.
A Comparison of Few-Shot Learning Methods for Underwater Optical and Sonar Image Classification
May 10, 2020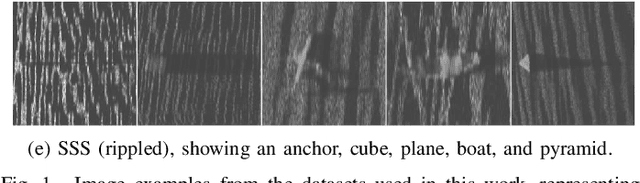
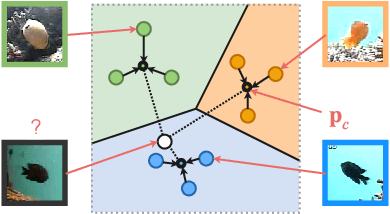
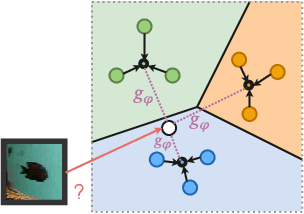
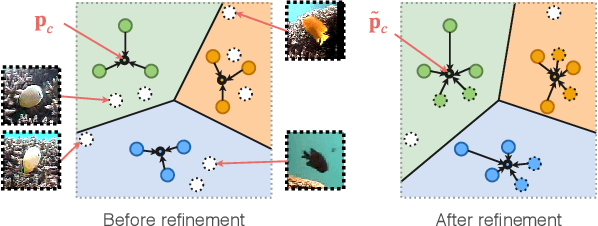
Deep convolutional neural networks have shown to perform well in underwater object recognition tasks, on both optical and sonar images. However, many such methods require hundreds, if not thousands, of images per class to generalize well to unseen examples. This is restricting in situations where obtaining and labeling larger volumes of data is impractical, such as observing a rare object, performing real-time operations, or operating in new underwater environments. Finding an algorithm capable of learning from only a few samples could reduce the time spent obtaining and labeling datasets, and accelerate the training of deep-learning models. To the best of our knowledge, this is the first paper to evaluate and compare several Few-Shot Learning (FSL) methods using underwater optical and side-scan sonar imagery. Our results show that FSL methods offer a significant advantage over the traditional transfer learning methods that employ fine-tuning of pre-trained models. Our findings show that FSL methods are not too far from being used on real-world robotics scenarios and expanding the capabilities of autonomous underwater systems.
RadarSLAM: Radar based Large-Scale SLAM in All Weathers
May 05, 2020
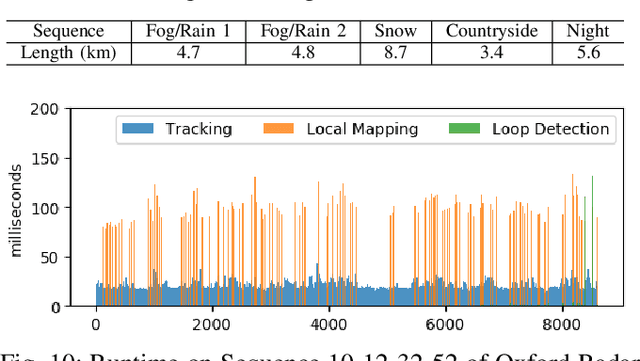
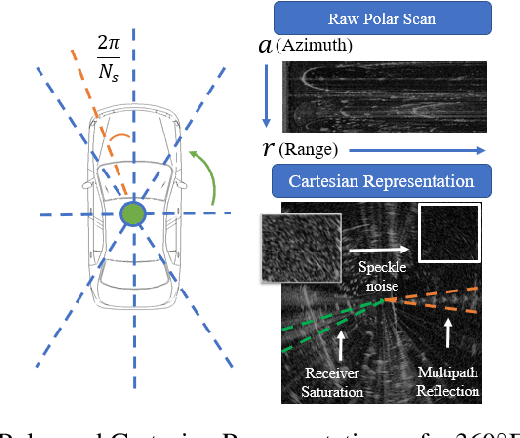
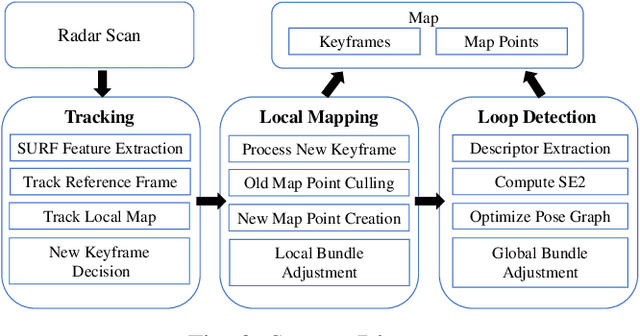
Numerous Simultaneous Localization and Mapping (SLAM) algorithms have been presented in last decade using different sensor modalities. However, robust SLAM in extreme weather conditions is still an open research problem. In this paper, RadarSLAM, a full radar based graph SLAM system, is proposed for reliable localization and mapping in large-scale environments. It is composed of pose tracking, local mapping, loop closure detection and pose graph optimization, enhanced by novel feature matching and probabilistic point cloud generation on radar images. Extensive experiments are conducted on a public radar dataset and several self-collected radar sequences, demonstrating the state-of-the-art reliability and localization accuracy in various adverse weather conditions, such as dark night, dense fog and heavy snowfall.
Learning Generalisable Coupling Terms for Obstacle Avoidance via Low-dimensional Geometric Descriptors
Jun 24, 2019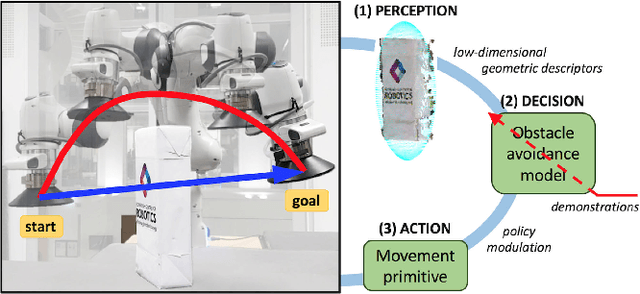
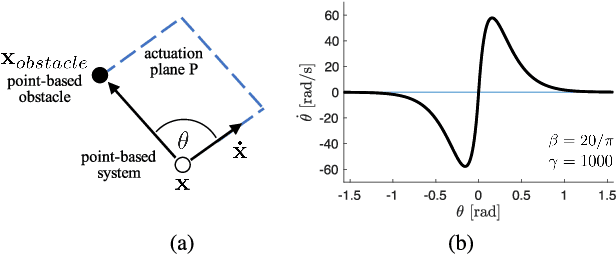
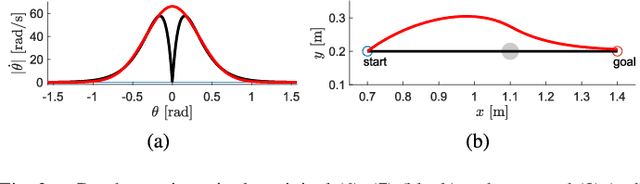
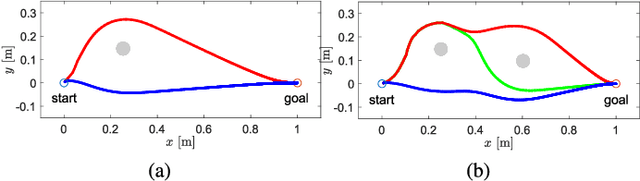
Unforeseen events are frequent in the real-world environments where robots are expected to assist, raising the need for fast replanning of the policy in execution to guarantee the system and environment safety. Inspired by human behavioural studies of obstacle avoidance and route selection, this paper presents a hierarchical framework which generates reactive yet bounded obstacle avoidance behaviours through a multi-layered analysis. The framework leverages the strengths of learning techniques and the versatility of dynamic movement primitives to efficiently unify perception, decision, and action levels via low-dimensional geometric descriptors of the environment. Experimental evaluation on synthetic environments and a real anthropomorphic manipulator proves that the robustness and generalisation capabilities of the proposed approach regardless of the obstacle avoidance scenario makes it suitable for robotic systems in real-world environments.
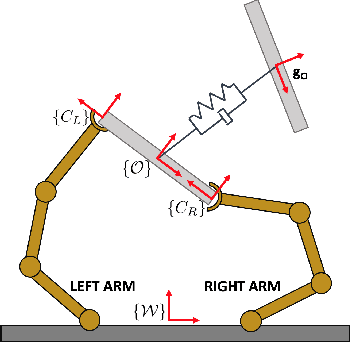
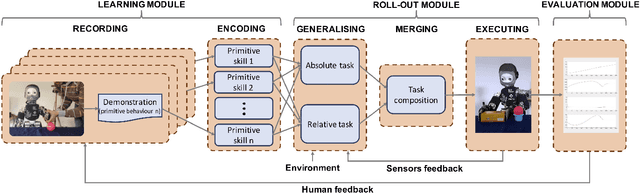
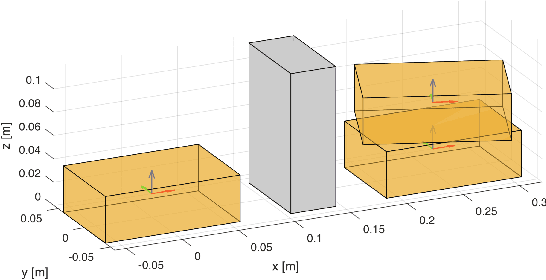
Learning and Composing Primitive Skills for Dual-arm Manipulation
May 25, 2019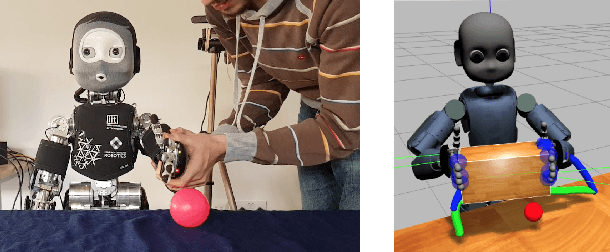
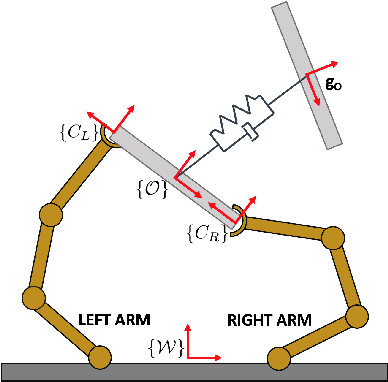
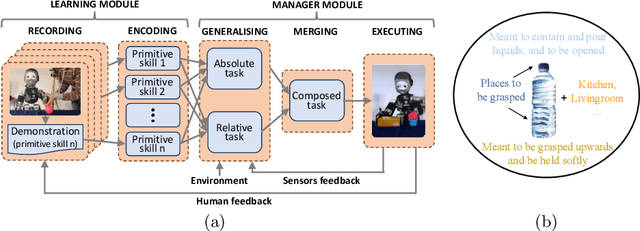
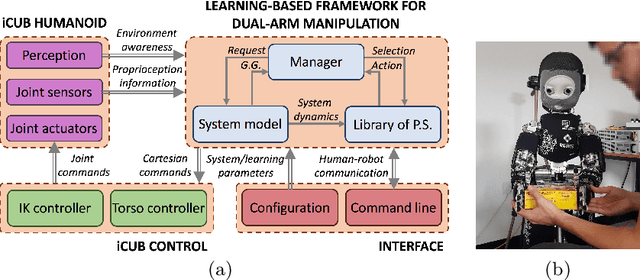
In an attempt to confer robots with complex manipulation capabilities, dual-arm anthropomorphic systems have become an important research topic in the robotics community. Most approaches in the literature rely upon a great understanding of the dynamics underlying the system's behaviour and yet offer limited autonomous generalisation capabilities. To address these limitations, this work proposes a modelisation for dual-arm manipulators based on dynamic movement primitives laying in two orthogonal spaces. The modularity and learning capabilities of this model are leveraged to formulate a novel end-to-end learning-based framework which (i) learns a library of primitive skills from human demonstrations, and (ii) composes such knowledge simultaneously and sequentially to confront novel scenarios. The feasibility of the proposal is evaluated by teaching the iCub humanoid the basic skills to succeed on simulated dual-arm pick-and-place tasks. The results suggest the learning and generalisation capabilities of the proposed framework extend to autonomously conduct undemonstrated dual-arm manipulation tasks.
Learning and Generalisation of Primitives Skills Towards Robust Dual-arm Manipulation
Apr 02, 2019
Robots are becoming a vital ingredient in society. Some of their daily tasks require dual-arm manipulation skills in the rapidly changing, dynamic and unpredictable real-world environments where they have to operate. Given the expertise of humans in conducting these activities, it is natural to study humans' motions to use the resulting knowledge in robotic control. With this in mind, this work leverages human knowledge to formulate a more general, real-time, and less task-specific framework for dual-arm manipulation. The proposed framework is evaluated on the iCub humanoid robot and several synthetic experiments, by conducting a dual-arm pick-and-place task of a parcel in the presence of unexpected obstacles. Results suggest the suitability of the method towards robust and generalisable dual-arm manipulation.
A New Framework for Synthetic Aperture Sonar Micronavigation
Jul 26, 2017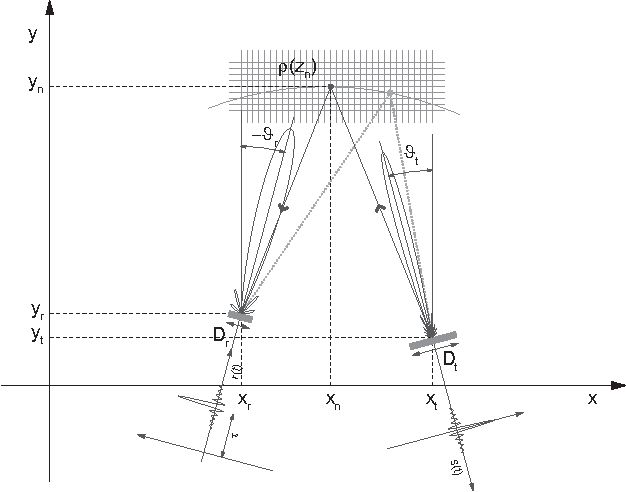
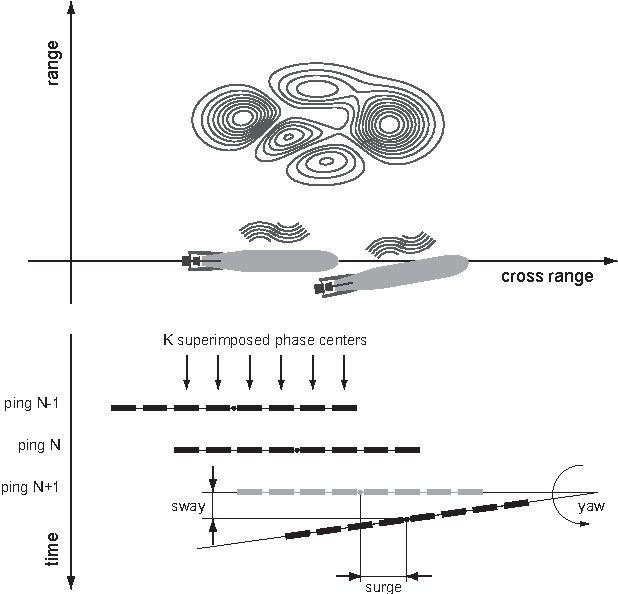

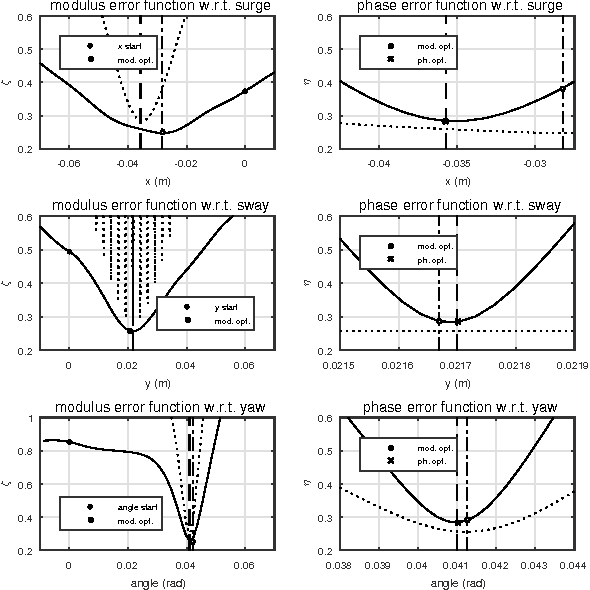
Synthetic aperture imaging systems achieve constant azimuth resolution by coherently summating the observations acquired along the aperture path. At this aim, their locations have to be known with subwavelength accuracy. In underwater Synthetic Aperture Sonar (SAS), the nature of propagation and navigation in water makes the retrieval of this information challenging. Inertial sensors have to be employed in combination with signal processing techniques, which are usually referred to as micronavigation. In this paper we propose a novel micronavigation approach based on the minimization of an error function between two contiguous pings having some mutual information. This error is obtained by comparing the vector space intersections between the pings orthogonal projectors. The effectiveness and generality of the proposed approach is demonstrated by means of simulations and by means of an experiment performed in a controlled environment.