 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA PAC-Bayes Approach for Controlling Unknown Linear Discrete-time Systems
May 11, 2026This paper presents a PAC-Bayes framework for learning controllers for unknown stochastic linear discrete-time systems, where the system parameters are drawn from a fixed but unknown distribution. We derive a data-dependent high probability bound on the performance of any learned (stochastic) controller, and propose novel efficient learning algorithms with theoretical guarantees, which can be implemented for both finite and infinite controller spaces. Compared to prior work, our bound holds for unbounded quadratic cost. In the special case where LQG is optimal, our numerical results suggest that the learned controllers achieve comparable performance to LQG.
IDK Cascades: Fast Deep Learning by Learning not to Overthink
Jun 27, 2018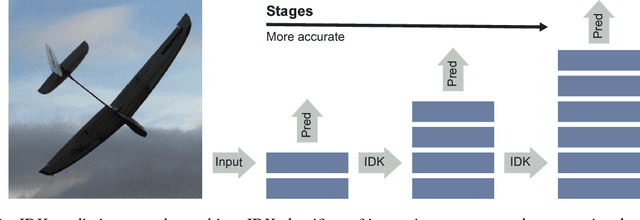


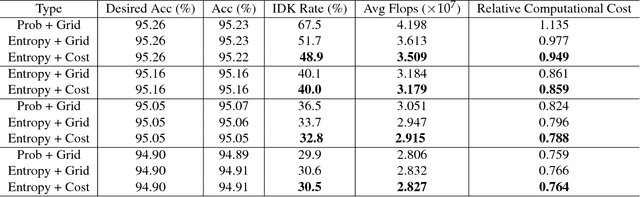
Advances in deep learning have led to substantial increases in prediction accuracy but have been accompanied by increases in the cost of rendering predictions. We conjecture that fora majority of real-world inputs, the recent advances in deep learning have created models that effectively "overthink" on simple inputs. In this paper, we revisit the classic question of building model cascades that primarily leverage class asymmetry to reduce cost. We introduce the "I Don't Know"(IDK) prediction cascades framework, a general framework to systematically compose a set of pre-trained models to accelerate inference without a loss in prediction accuracy. We propose two search based methods for constructing cascades as well as a new cost-aware objective within this framework. The proposed IDK cascade framework can be easily adopted in the existing model serving systems without additional model re-training. We evaluate the proposed techniques on a range of benchmarks to demonstrate the effectiveness of the proposed framework.