 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Average Sensitivity to Small-Loss Regret Bounds under Random-Order Model
Feb 10, 2026We study online learning in the random-order model, where the multiset of loss functions is chosen adversarially but revealed in a uniformly random order. Building on the batch-to-online conversion by Dong and Yoshida (2023), we show that if an offline algorithm admits a $(1+\varepsilon)$-approximation guarantee and the effect of $\varepsilon$ on its average sensitivity is characterized by a function $\varphi(\varepsilon)$, then an adaptive choice of $\varepsilon$ yields a small-loss regret bound of $\tilde O(\varphi^{\star}(\mathrm{OPT}_T))$, where $\varphi^{\star}$ is the concave conjugate of $\varphi$, $\mathrm{OPT}_T$ is the offline optimum over $T$ rounds, and $\tilde O$ hides polylogarithmic factors in $T$. Our method requires no regularity assumptions on loss functions, such as smoothness, and can be viewed as a generalization of the AdaGrad-style tuning applied to the approximation parameter $\varepsilon$. Our result recovers and strengthens the $(1+\varepsilon)$-approximate regret bounds of Dong and Yoshida (2023) and yields small-loss regret bounds for online $k$-means clustering, low-rank approximation, and regression. We further apply our framework to online submodular function minimization using $(1\pm\varepsilon)$-cut sparsifiers of submodular hypergraphs, obtaining a small-loss regret bound of $\tilde O(n^{3/4}(1 + \mathrm{OPT}_T^{3/4}))$, where $n$ is the ground-set size. Our approach sheds light on the power of sparsification and related techniques in establishing small-loss regret bounds in the random-order model.
Noise Stability of Transformer Models
Feb 09, 2026Understanding simplicity biases in deep learning offers a promising path toward developing reliable AI. A common metric for this, inspired by Boolean function analysis, is average sensitivity, which captures a model's robustness to single-token perturbations. We argue that average sensitivity has two key limitations: it lacks a natural generalization to real-valued domains and fails to explain the "junta-like" input dependence we empirically observe in modern LLMs. To address these limitations, we propose noise stability as a more comprehensive simplicity metric. Noise stability expresses a model's robustness to correlated noise applied to all input coordinates simultaneously. We provide a theoretical analysis of noise stability for single-layer attention and ReLU MLP layers and tackle the multi-layer propagation problem with a covariance interval propagation approach. Building on this theory, we develop a practical noise stability regularization method. Experiments on algorithmic and next-token-prediction tasks show that our regularizer consistently catalyzes grokking and accelerates training by approximately $35\%$ and $75\%$ respectively. Our results sculpt a new connection between signal propagation in neural networks and interpretability, with noise stability emerging as a powerful tool for understanding and improving modern Transformers.
From Generative to Episodic: Sample-Efficient Replicable Reinforcement Learning
Jul 16, 2025The epidemic failure of replicability across empirical science and machine learning has recently motivated the formal study of replicable learning algorithms [Impagliazzo et al. (2022)]. In batch settings where data comes from a fixed i.i.d. source (e.g., hypothesis testing, supervised learning), the design of data-efficient replicable algorithms is now more or less understood. In contrast, there remain significant gaps in our knowledge for control settings like reinforcement learning where an agent must interact directly with a shifting environment. Karbasi et. al show that with access to a generative model of an environment with $S$ states and $A$ actions (the RL 'batch setting'), replicably learning a near-optimal policy costs only $\tilde{O}(S^2A^2)$ samples. On the other hand, the best upper bound without a generative model jumps to $\tilde{O}(S^7 A^7)$ [Eaton et al. (2024)] due to the substantial difficulty of environment exploration. This gap raises a key question in the broader theory of replicability: Is replicable exploration inherently more expensive than batch learning? Is sample-efficient replicable RL even possible? In this work, we (nearly) resolve this problem (for low-horizon tabular MDPs): exploration is not a significant barrier to replicable learning! Our main result is a replicable RL algorithm on $\tilde{O}(S^2A)$ samples, bridging the gap between the generative and episodic settings. We complement this with a matching $\tilde{\Omega}(S^2A)$ lower bound in the generative setting (under the common parallel sampling assumption) and an unconditional lower bound in the episodic setting of $\tilde{\Omega}(S^2)$ showcasing the near-optimality of our algorithm with respect to the state space $S$.
Replicability is Asymptotically Free in Multi-armed Bandits
Feb 12, 2024

This work is motivated by the growing demand for reproducible machine learning. We study the stochastic multi-armed bandit problem. In particular, we consider a replicable algorithm that ensures, with high probability, that the algorithm's sequence of actions is not affected by the randomness inherent in the dataset. We observe that existing algorithms require $O(1/\rho^2)$ times more regret than nonreplicable algorithms, where $\rho$ is the level of nonreplication. However, we demonstrate that this additional cost is unnecessary when the time horizon $T$ is sufficiently large for a given $\rho$, provided that the magnitude of the confidence bounds is chosen carefully. We introduce an explore-then-commit algorithm that draws arms uniformly before committing to a single arm. Additionally, we examine a successive elimination algorithm that eliminates suboptimal arms at the end of each phase. To ensure the replicability of these algorithms, we incorporate randomness into their decision-making processes. We extend the use of successive elimination to the linear bandit problem as well. For the analysis of these algorithms, we propose a principled approach to limiting the probability of nonreplication. This approach elucidates the steps that existing research has implicitly followed. Furthermore, we derive the first lower bound for the two-armed replicable bandit problem, which implies the optimality of the proposed algorithms up to a $\log\log T$ factor for the two-armed case.
General Transformation for Consistent Online Approximation Algorithms
Jun 12, 2023
We introduce a transformation framework that can be utilized to develop online algorithms with low $\epsilon$-approximate regret in the random-order model from offline approximation algorithms. We first give a general reduction theorem that transforms an offline approximation algorithm with low average sensitivity to an online algorithm with low $\epsilon$-approximate regret. We then demonstrate that offline approximation algorithms can be transformed into a low-sensitivity version using a coreset construction method. To showcase the versatility of our approach, we apply it to various problems, including online $(k,z)$-clustering, online matrix approximation, and online regression, and successfully achieve polylogarithmic $\epsilon$-approximate regret for each problem. Moreover, we show that in all three cases, our algorithm also enjoys low inconsistency, which may be desired in some online applications.
Controlling Posterior Collapse by an Inverse Lipschitz Constraint on the Decoder Network
Apr 25, 2023



Variational autoencoders (VAEs) are one of the deep generative models that have experienced enormous success over the past decades. However, in practice, they suffer from a problem called posterior collapse, which occurs when the encoder coincides, or collapses, with the prior taking no information from the latent structure of the input data into consideration. In this work, we introduce an inverse Lipschitz neural network into the decoder and, based on this architecture, provide a new method that can control in a simple and clear manner the degree of posterior collapse for a wide range of VAE models equipped with a concrete theoretical guarantee. We also illustrate the effectiveness of our method through several numerical experiments.
Sparsification of Decomposable Submodular Functions
Jan 18, 2022
Submodular functions are at the core of many machine learning and data mining tasks. The underlying submodular functions for many of these tasks are decomposable, i.e., they are sum of several simple submodular functions. In many data intensive applications, however, the number of underlying submodular functions in the original function is so large that we need prohibitively large amount of time to process it and/or it does not even fit in the main memory. To overcome this issue, we introduce the notion of sparsification for decomposable submodular functions whose objective is to obtain an accurate approximation of the original function that is a (weighted) sum of only a few submodular functions. Our main result is a polynomial-time randomized sparsification algorithm such that the expected number of functions used in the output is independent of the number of underlying submodular functions in the original function. We also study the effectiveness of our algorithm under various constraints such as matroid and cardinality constraints. We complement our theoretical analysis with an empirical study of the performance of our algorithm.
Local Algorithms for Estimating Effective Resistance
Jun 07, 2021
Effective resistance is an important metric that measures the similarity of two vertices in a graph. It has found applications in graph clustering, recommendation systems and network reliability, among others. In spite of the importance of the effective resistances, we still lack efficient algorithms to exactly compute or approximate them on massive graphs. In this work, we design several \emph{local algorithms} for estimating effective resistances, which are algorithms that only read a small portion of the input while still having provable performance guarantees. To illustrate, our main algorithm approximates the effective resistance between any vertex pair $s,t$ with an arbitrarily small additive error $\varepsilon$ in time $O(\mathrm{poly}(\log n/\varepsilon))$, whenever the underlying graph has bounded mixing time. We perform an extensive empirical study on several benchmark datasets, validating the performance of our algorithms.
RelWalk A Latent Variable Model Approach to Knowledge Graph Embedding
Jan 25, 2021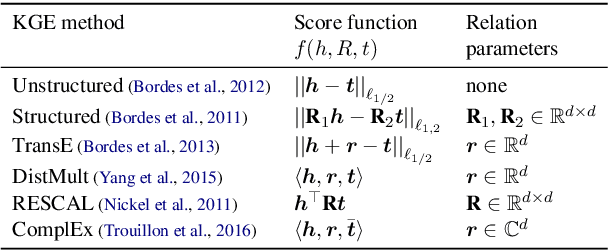
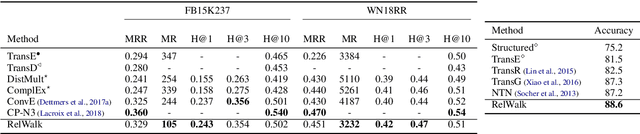
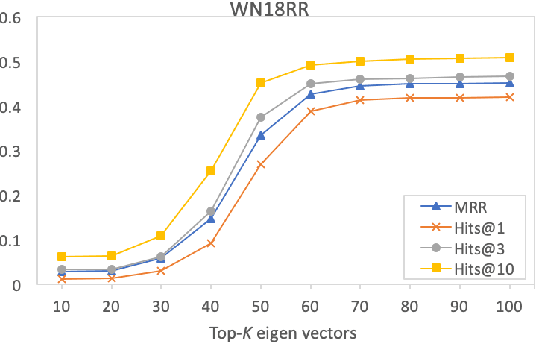
Embedding entities and relations of a knowledge graph in a low-dimensional space has shown impressive performance in predicting missing links between entities. Although progresses have been achieved, existing methods are heuristically motivated and theoretical understanding of such embeddings is comparatively underdeveloped. This paper extends the random walk model (Arora et al., 2016a) of word embeddings to Knowledge Graph Embeddings (KGEs) to derive a scoring function that evaluates the strength of a relation R between two entities h (head) and t (tail). Moreover, we show that marginal loss minimisation, a popular objective used in much prior work in KGE, follows naturally from the log-likelihood ratio maximisation under the probabilities estimated from the KGEs according to our theoretical relationship. We propose a learning objective motivated by the theoretical analysis to learn KGEs from a given knowledge graph. Using the derived objective, accurate KGEs are learnt from FB15K237 and WN18RR benchmark datasets, providing empirical evidence in support of the theory.
Downsampling for Testing and Learning in Product Distributions
Jul 15, 2020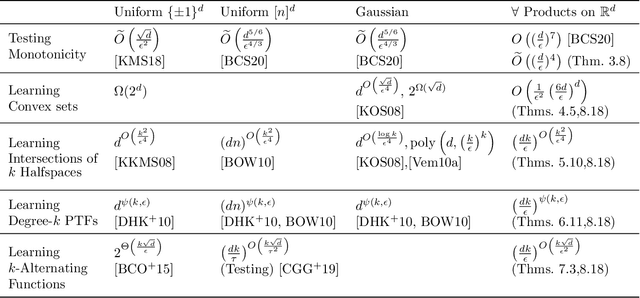
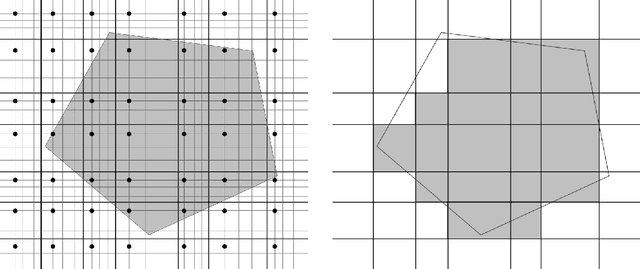
We study the domain reduction problem of eliminating dependence on $n$ from the complexity of property testing and learning algorithms on domain $[n]^d$, and the related problem of establishing testing and learning results for product distributions over $\mathbb{R}^d$. Our method, which we call downsampling, gives conceptually simple proofs for several results: 1. A 1-page proof of the recent $o(d)$-query monotonicity tester for the hypergrid (Black, Chakrabarty & Seshadhri, SODA 2020), and an improvement from $O(d^7)$ to $\widetilde O(d^4)$ in the sample complexity of their distribution-free monotonicity tester for product distributions over $\mathbb{R}^d$; 2. An $\exp(\widetilde O(kd))$-time agnostic learning algorithm for functions of $k$ convex sets in product distributions; 3. A polynomial-time agnostic learning algorithm for functions of a constant number of halfspaces in product distributions; 4. A polynomial-time agnostic learning algorithm for constant-degree polynomial threshold functions in product distributions; 5. An $\exp(\widetilde O(k \sqrt d))$-time agnostic learning algorithm for $k$-alternating functions in product distributions.