 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Multi-class Feature Selection via $l_{2,0}$-Norm Regularization Minimization
Oct 08, 2020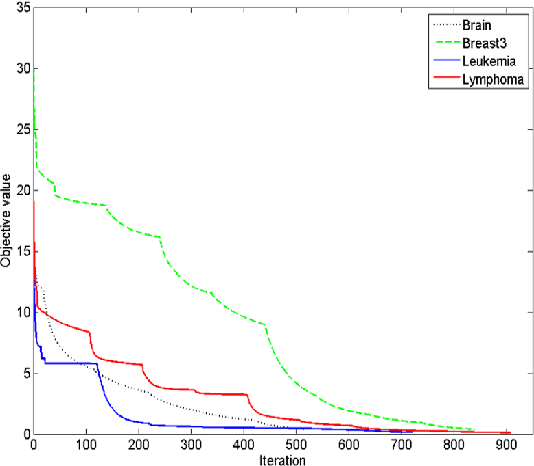
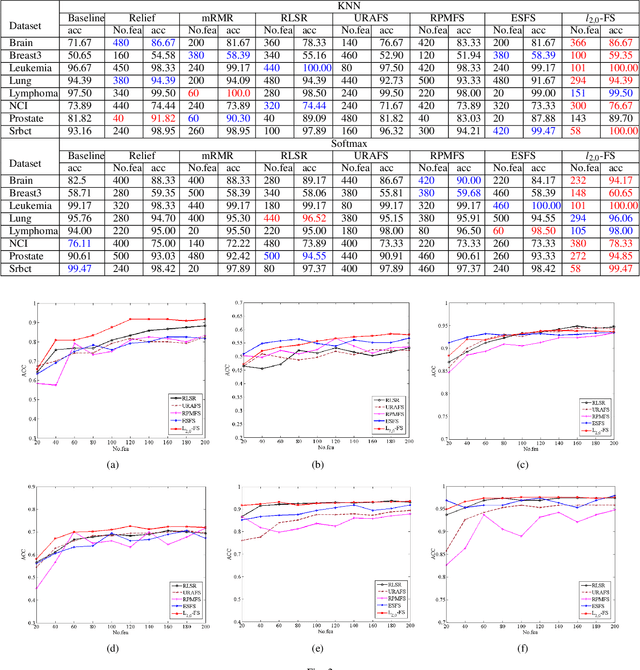
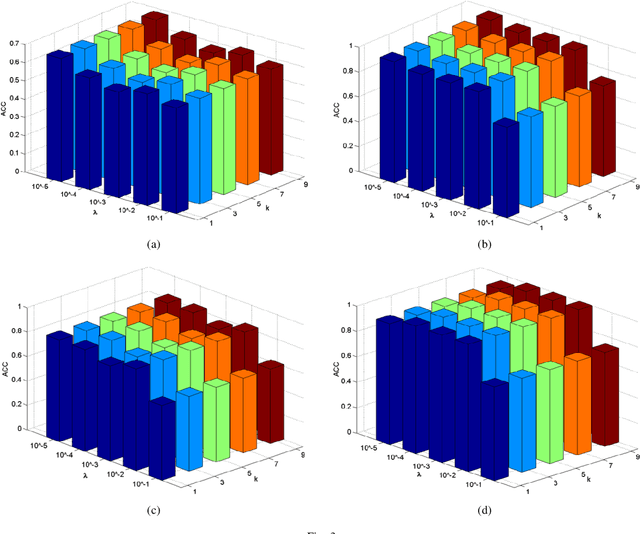
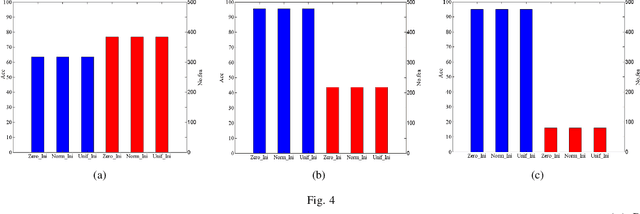
Feature selection is an important data preprocessing in data mining and machine learning, which can reduce feature size without deteriorating model's performance. Recently, sparse regression based feature selection methods have received considerable attention due to their good performance. However, these methods generally cannot determine the number of selected features automatically without using a predefined threshold. In order to get a satisfactory result, it often costs significant time and effort to tune the number of selected features carefully. To this end, this paper proposed a novel framework to solve the $l_{2,0}$-norm regularization least square problem directly for multi-class feature selection, which can produce exact rowsparsity solution for the weights matrix, features corresponding to non-zero rows will be selected thus the number of selected features can be determined automatically. An efficient homotopy iterative hard threshold (HIHT) algorithm is derived to solve the above optimization problem and find out the stable local solution. Besides, in order to reduce the computational time of HIHT, an acceleration version of HIHT (AHIHT) is derived. Extensive experiments on eight biological datasets show that the proposed method can achieve higher classification accuracy with fewest number of selected features comparing with the approximate convex counterparts and state-of-the-art feature selection methods. The robustness of classification accuracy to the regularization parameter is also exhibited.
An Internal Covariate Shift Bounding Algorithm for Deep Neural Networks by Unitizing Layers' Outputs
Jan 09, 2020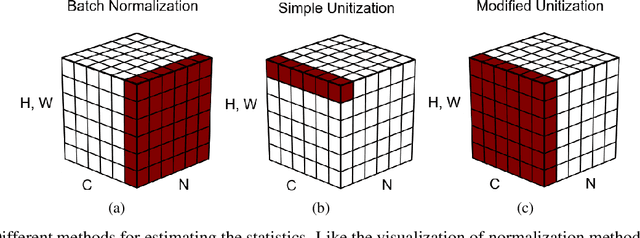
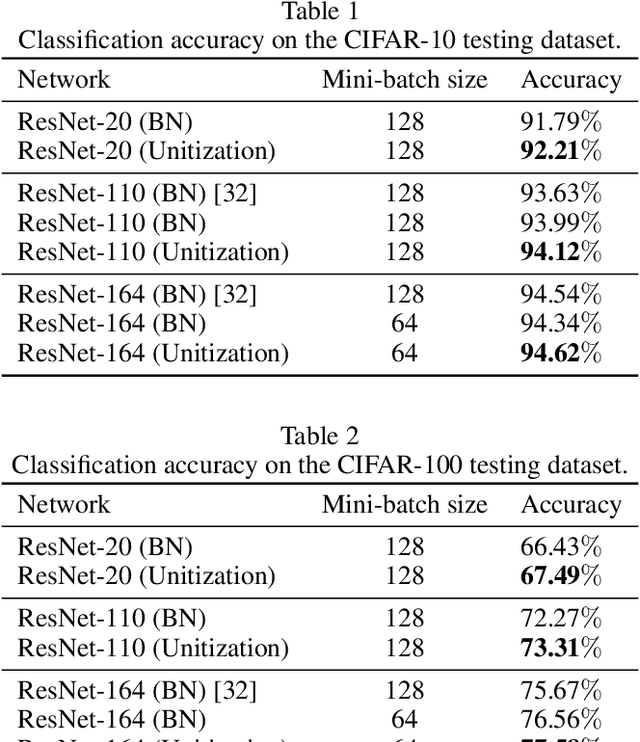
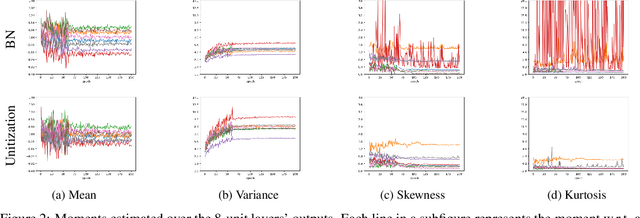
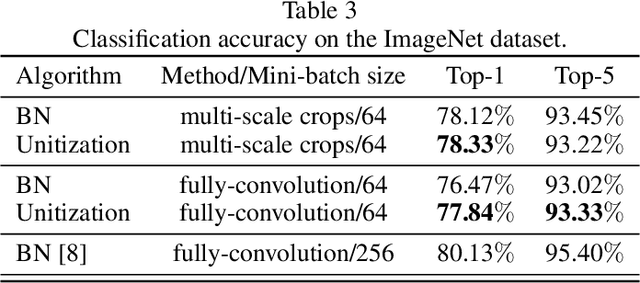
Batch Normalization (BN) techniques have been proposed to reduce the so-called Internal Covariate Shift (ICS) by attempting to keep the distributions of layer outputs unchanged. Experiments have shown their effectiveness on training deep neural networks. However, since only the first two moments are controlled in these BN techniques, it seems that a weak constraint is imposed on layer distributions and furthermore whether such constraint can reduce ICS is unknown. Thus this paper proposes a measure for ICS by using the Earth Mover (EM) distance and then derives the upper and lower bounds for the measure to provide a theoretical analysis of BN. The upper bound has shown that BN techniques can control ICS only for the outputs with low dimensions and small noise whereas their control is NOT effective in other cases. This paper also proves that such control is just a bounding of ICS rather than a reduction of ICS. Meanwhile, the analysis shows that the high-order moments and noise, which BN cannot control, have great impact on the lower bound. Based on such analysis, this paper furthermore proposes an algorithm that unitizes the outputs with an adjustable parameter to further bound ICS in order to cope with the problems of BN. The upper bound for the proposed unitization is noise-free and only dominated by the parameter. Thus, the parameter can be trained to tune the bound and further to control ICS. Besides, the unitization is embedded into the framework of BN to reduce the information loss. The experiments show that this proposed algorithm outperforms existing BN techniques on CIFAR-10, CIFAR-100 and ImageNet datasets.
Visualizing the Invisible: Occluded Vehicle Segmentation and Recovery
Jul 22, 2019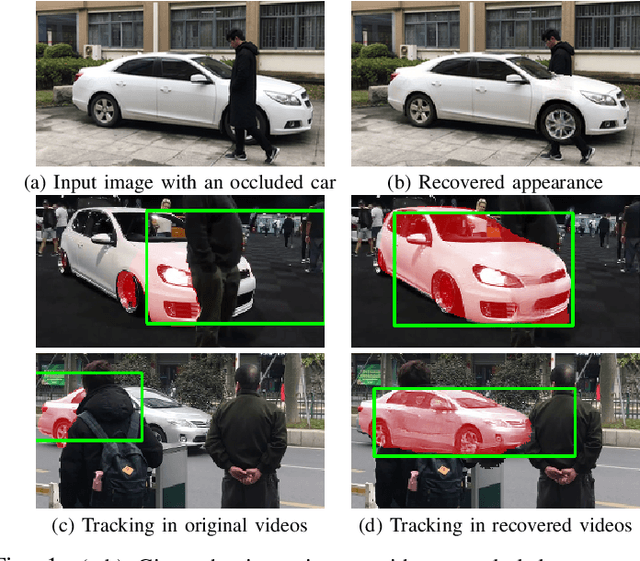
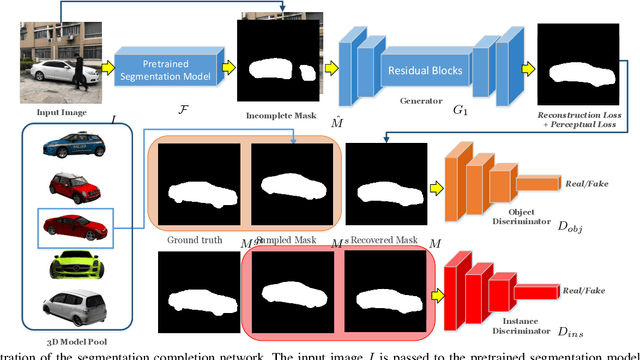
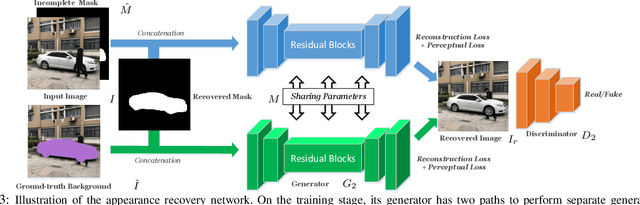
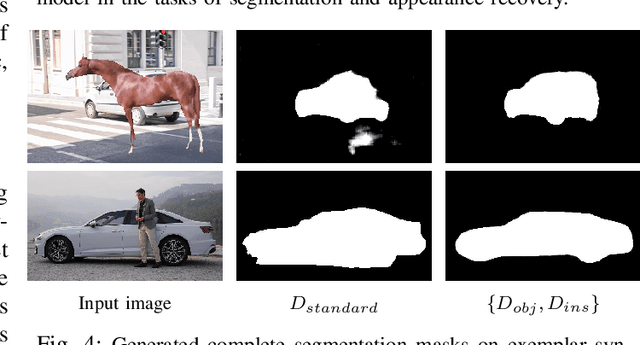
In this paper, we propose a novel iterative multi-task framework to complete the segmentation mask of an occluded vehicle and recover the appearance of its invisible parts. In particular, to improve the quality of the segmentation completion, we present two coupled discriminators and introduce an auxiliary 3D model pool for sampling authentic silhouettes as adversarial samples. In addition, we propose a two-path structure with a shared network to enhance the appearance recovery capability. By iteratively performing the segmentation completion and the appearance recovery, the results will be progressively refined. To evaluate our method, we present a dataset, the Occluded Vehicle dataset, containing synthetic and real-world occluded vehicle images. We conduct comparison experiments on this dataset and demonstrate that our model outperforms the state-of-the-art in tasks of recovering segmentation mask and appearance for occluded vehicles. Moreover, we also demonstrate that our appearance recovery approach can benefit the occluded vehicle tracking in real-world videos.
Enhancement Mask for Hippocampus Detection and Segmentation
Feb 12, 2019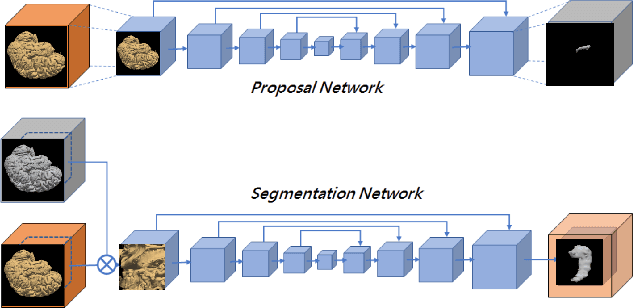
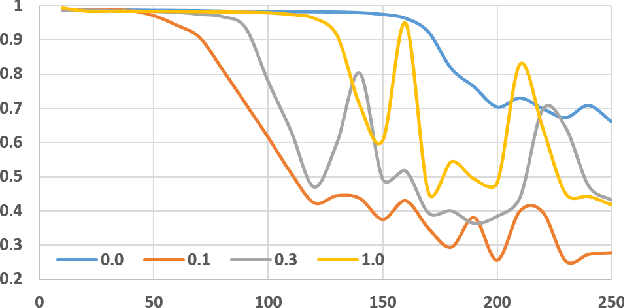
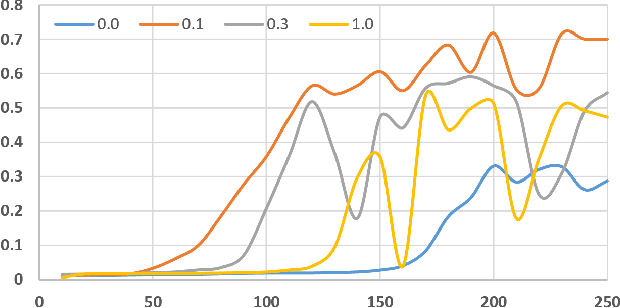
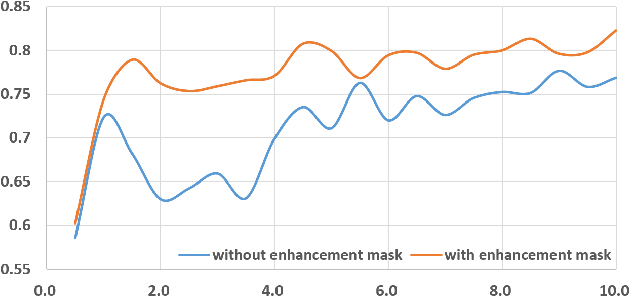
Detection and segmentation of the hippocampal structures in volumetric brain images is a challenging problem in the area of medical imaging. In this paper, we propose a two-stage 3D fully convolutional neural network that efficiently detects and segments the hippocampal structures. In particular, our approach first localizes the hippocampus from the whole volumetric image while obtaining a proposal for a rough segmentation. After localization, we apply the proposal as an enhancement mask to extract the fine structure of the hippocampus. The proposed method has been evaluated on a public dataset and compares with state-of-the-art approaches. Results indicate the effectiveness of the proposed method, which yields mean Dice Similarity Coefficients (i.e. DSC) of $0.897$ and $0.900$ for the left and right hippocampus, respectively. Furthermore, extensive experiments manifest that the proposed enhancement mask layer has remarkable benefits for accelerating training process and obtaining more accurate segmentation results.
* This paper has been published in the proceedings of IEEE International Conference on Information and Automation 2018
Deformable Object Tracking with Gated Fusion
Sep 27, 2018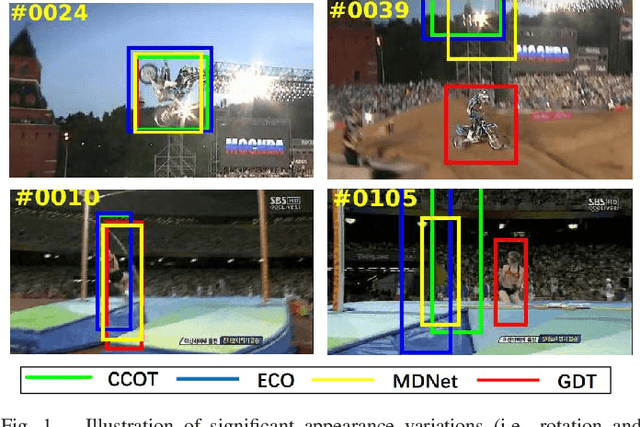
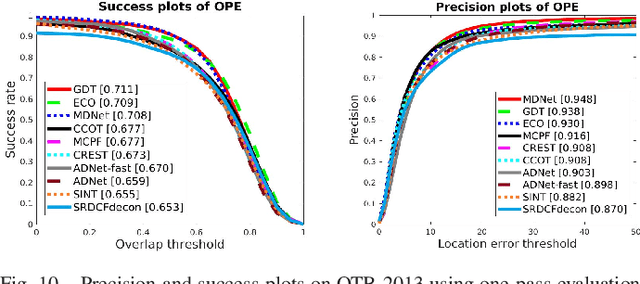
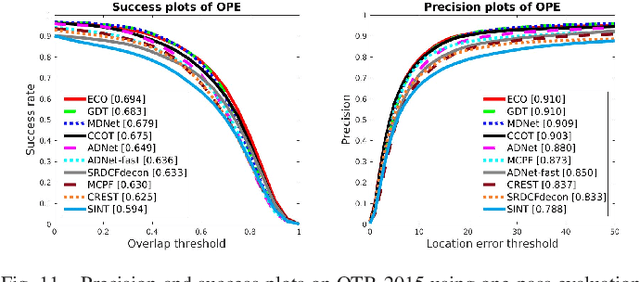
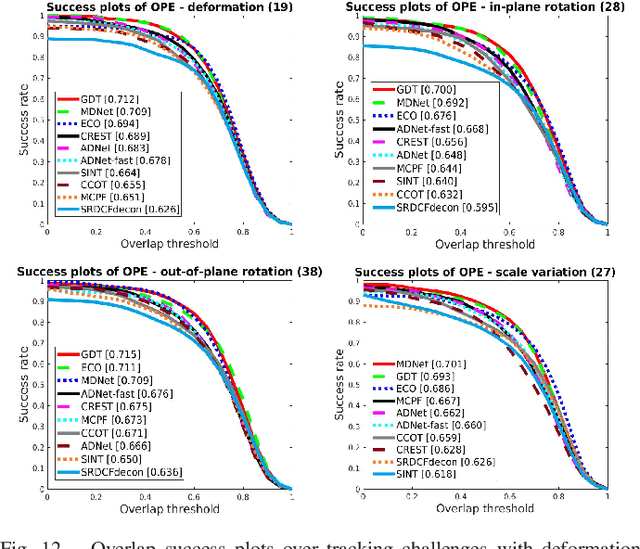
The tracking-by-detection framework receives growing attentions through the integration with the Convolutional Neural Network (CNN). Existing methods, however, fail to track objects with severe appearance variations. This is because the traditional convolutional operation is performed on fixed grids, and thus may not be able to find the correct response while the object is changing pose or under varying environmental conditions. In this paper, we propose a deformable convolution layer to enrich the target appearance representations in the tracking-by-detection framework. We aim to capture the target appearance variations via deformable convolution and supplement its original appearance through residual learning. Meanwhile, we propose a gated fusion scheme to control how the variations captured by the deformable convolution affect the original appearance. The enriched feature representation through deformable convolution facilitates the discrimination of the CNN classifier on the target object and background. Extensive experiments on the standard benchmarks show that the proposed tracker performs favorably against state-of-the-art methods.
An Intelligent Extraversion Analysis Scheme from Crowd Trajectories for Surveillance
Sep 27, 2018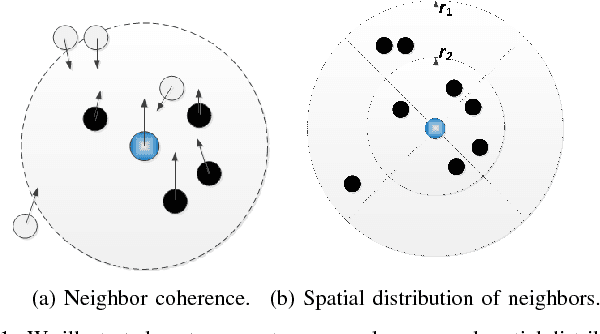
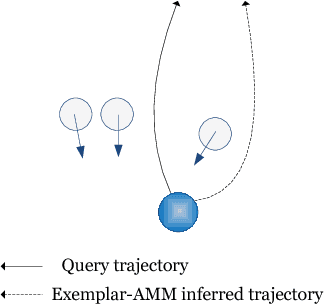
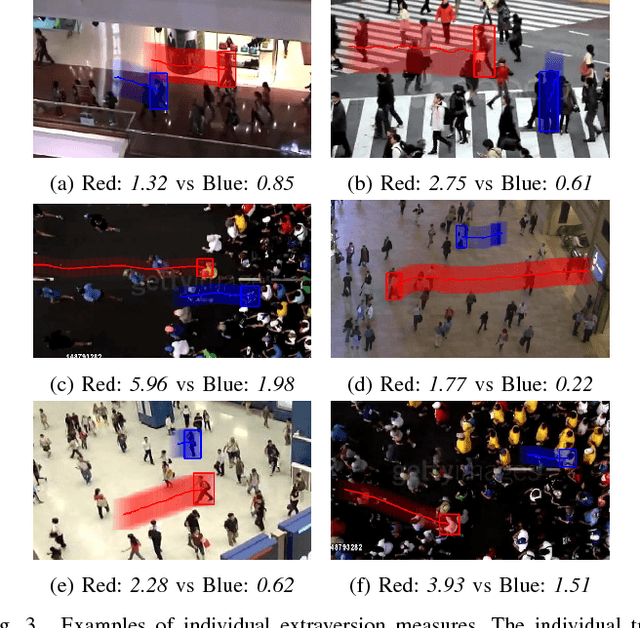
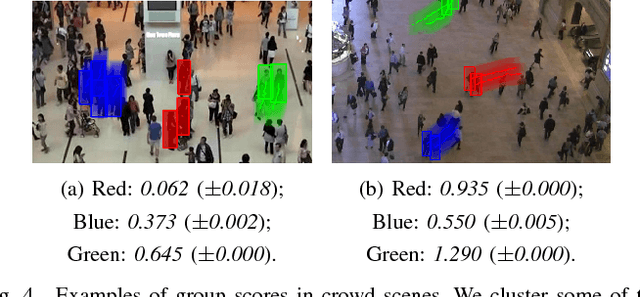
In recent years, crowd analysis is important for applications such as smart cities, intelligent transportation system, customer behavior prediction, and visual surveillance. Understanding the characteristics of the individual motion in a crowd can be beneficial for social event detection and abnormal detection, but it has rarely been studied. In this paper, we focus on the extraversion measure of individual motions in crowds based on trajectory data. Extraversion is one of typical personalities that is often observed in human crowd behaviors and it can reflect not only the characteristics of the individual motion, but also the that of the holistic crowd motions. To our best knowledge, this is the first attempt to analyze individual extraversion of crowd motions based on trajectories. To accomplish this, we first present a effective composite motion descriptor, which integrates the basic individual motion information and social metrics, to describe the extraversion of each individual in a crowd. The social metrics consider both the neighboring distribution and their interaction pattern. Since our major goal is to learn a universal scoring function that can measure the degrees of extraversion across varied crowd scenes, we incorporate and adapt the active learning technique to the relative attribute approach. Specifically, we assume the social groups in any crowds contain individuals with the similar degree of extraversion. Based on such assumption, we significantly reduce the computation cost by clustering and ranking the trajectories actively. Finally, we demonstrate the performance of our proposed method by measuring the degree of extraversion for real individual trajectories in crowds and analyzing crowd scenes from a real-world dataset.