 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrosswalkNet: An Optimized Deep Learning Framework for Pedestrian Crosswalk Detection in Aerial Images with High-Performance Computing
Jun 09, 2025With the increasing availability of aerial and satellite imagery, deep learning presents significant potential for transportation asset management, safety analysis, and urban planning. This study introduces CrosswalkNet, a robust and efficient deep learning framework designed to detect various types of pedestrian crosswalks from 15-cm resolution aerial images. CrosswalkNet incorporates a novel detection approach that improves upon traditional object detection strategies by utilizing oriented bounding boxes (OBB), enhancing detection precision by accurately capturing crosswalks regardless of their orientation. Several optimization techniques, including Convolutional Block Attention, a dual-branch Spatial Pyramid Pooling-Fast module, and cosine annealing, are implemented to maximize performance and efficiency. A comprehensive dataset comprising over 23,000 annotated crosswalk instances is utilized to train and validate the proposed framework. The best-performing model achieves an impressive precision of 96.5% and a recall of 93.3% on aerial imagery from Massachusetts, demonstrating its accuracy and effectiveness. CrosswalkNet has also been successfully applied to datasets from New Hampshire, Virginia, and Maine without transfer learning or fine-tuning, showcasing its robustness and strong generalization capability. Additionally, the crosswalk detection results, processed using High-Performance Computing (HPC) platforms and provided in polygon shapefile format, have been shown to accelerate data processing and detection, supporting real-time analysis for safety and mobility applications. This integration offers policymakers, transportation engineers, and urban planners an effective instrument to enhance pedestrian safety and improve urban mobility.
Dampen the Stop-and-Go Traffic with Connected and Automated Vehicles -- A Deep Reinforcement Learning Approach
May 17, 2020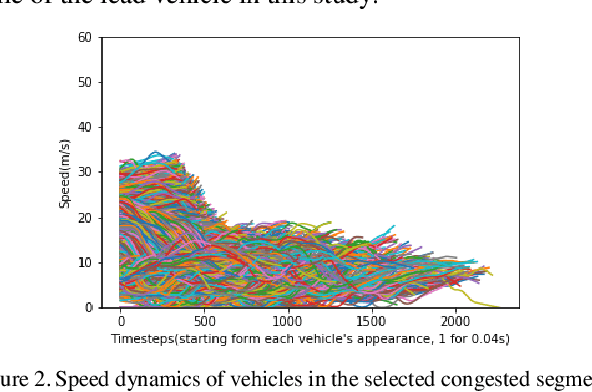
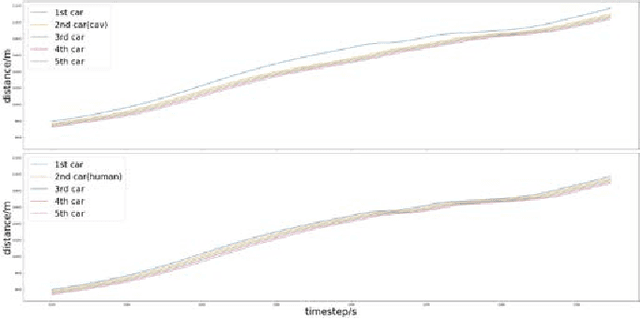
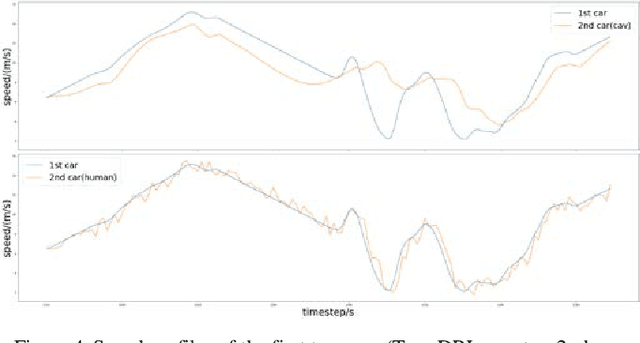
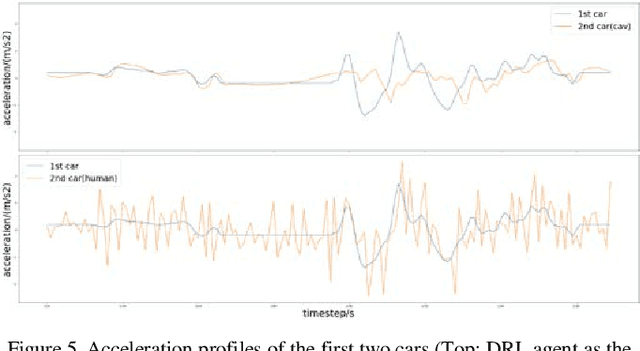
Stop-and-go traffic poses many challenges to tranportation system, but its formation and mechanism are still under exploration.however, it has been proved that by introducing Connected Automated Vehicles(CAVs) with carefully designed controllers one could dampen the stop-and-go waves in the vehicle fleet. Instead of using analytical model, this study adopts reinforcement learning to control the behavior of CAV and put a single CAV at the 2nd position of a vehicle fleet with the purpose to dampen the speed oscillation from the fleet leader and help following human drivers adopt more smooth driving behavior. The result show that our controller could decrease the spped oscillation of the CAV by 54% and 8%-28% for those following human-driven vehicles. Significant fuel consumption savings are also observed. Additionally, the result suggest that CAVs may act as a traffic stabilizer if they choose to behave slightly altruistically.
Cooperative Highway Work Zone Merge Control based on Reinforcement Learning in A Connected and Automated Environment
Jan 21, 2020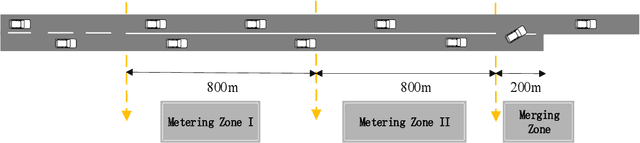
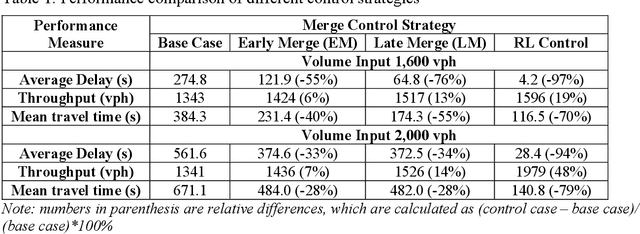
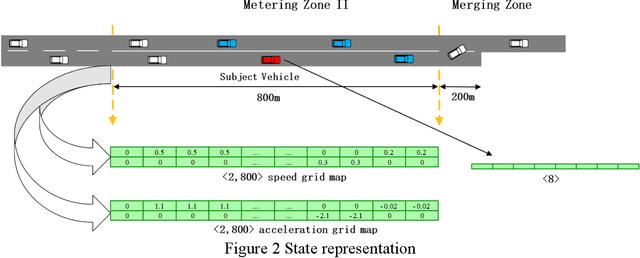
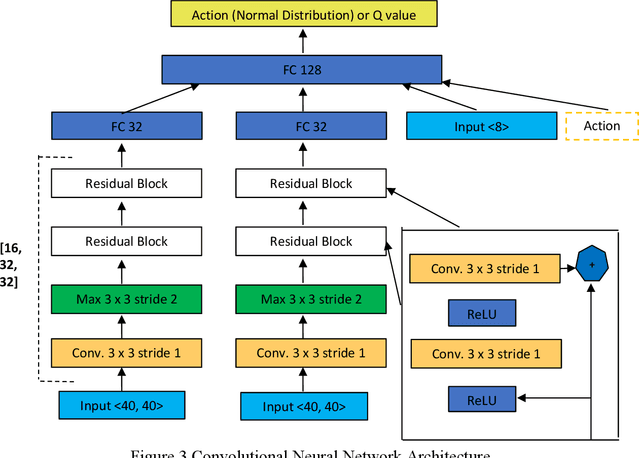
Given the aging infrastructure and the anticipated growing number of highway work zones in the United States, it is important to investigate work zone merge control, which is critical for improving work zone safety and capacity. This paper proposes and evaluates a novel highway work zone merge control strategy based on cooperative driving behavior enabled by artificial intelligence. The proposed method assumes that all vehicles are fully automated, connected and cooperative. It inserts two metering zones in the open lane to make space for merging vehicles in the closed lane. In addition, each vehicle in the closed lane learns how to optimally adjust its longitudinal position to find a safe gap in the open lane using an off-policy soft actor critic (SAC) reinforcement learning (RL) algorithm, considering the traffic conditions in its surrounding. The learning results are captured in convolutional neural networks and used to control individual vehicles in the testing phase. By adding the metering zones and taking the locations, speeds, and accelerations of surrounding vehicles into account, cooperation among vehicles is implicitly considered. This RL-based model is trained and evaluated using a microscopic traffic simulator. The results show that this cooperative RL-based merge control significantly outperforms popular strategies such as late merge and early merge in terms of both mobility and safety measures.
A Deep Neural Networks Approach for Pixel-Level Runway Pavement Crack Segmentation Using Drone-Captured Images
Jan 09, 2020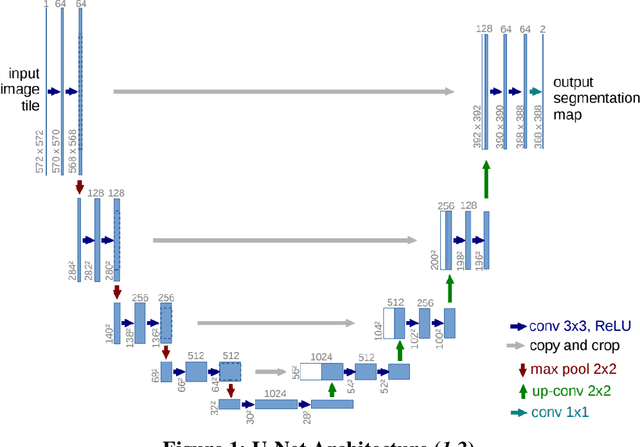
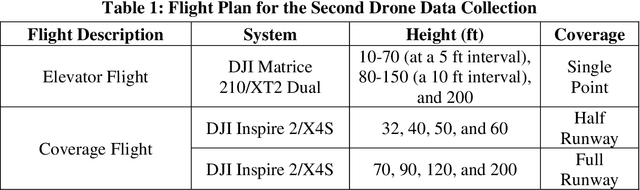

Pavement conditions are a critical aspect of asset management and directly affect safety. This study introduces a deep neural network method called U-Net for pavement crack segmentation based on drone-captured images to reduce the cost and time needed for airport runway inspection. The proposed approach can also be used for highway pavement conditions assessment during off-peak periods when there are few vehicles on the road. In this study, runway pavement images are collected using drone at various heights from the Fitchburg Municipal Airport (FMA) in Massachusetts to evaluate their quality and applicability for crack segmentation, from which an optimal height is determined. Drone images captured at the optimal height are then used to evaluate the crack segmentation performance of the U-Net model. Deep learning methods typically require a huge set of annotated training datasets for model development, which can be a major obstacle for their applications. An online annotated pavement image dataset is used together with the FMA data to train the U-Net model. The results show that U-Net performs well on the FMA testing data even with limited FMA training images, suggesting that it has good generalization ability and great potential to be used for both airport runways and highway pavements.