 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance in Pedestrian-Rich Environments with Deep Reinforcement Learning
Oct 24, 2019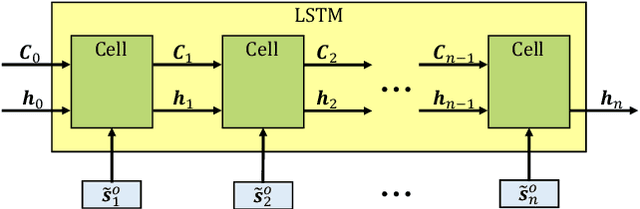
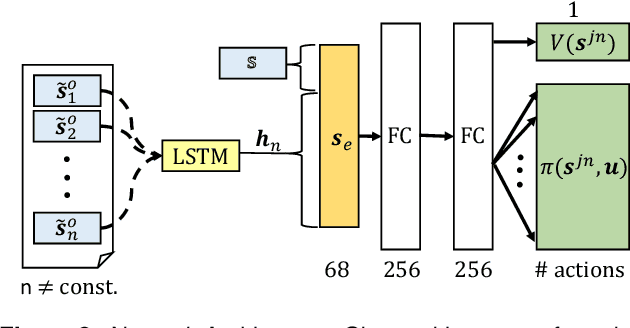
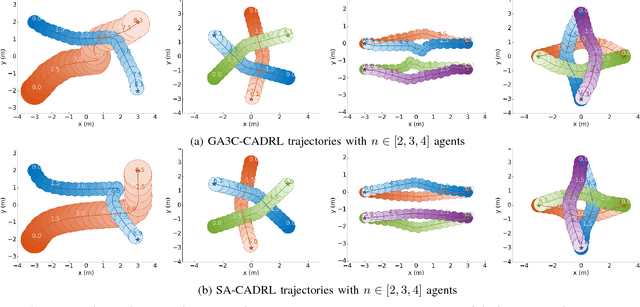
Collision avoidance algorithms are essential for safe and efficient robot operation among pedestrians. This work proposes using deep reinforcement (RL) learning as a framework to model the complex interactions and cooperation with nearby, decision-making agents (e.g., pedestrians, other robots). Existing RL-based works assume homogeneity of agent policies, use specific motion models over short timescales, or lack a mechanism to consider measurements taken with a large number (possibly varying) of nearby agents. Therefore, this work develops an algorithm that learns collision avoidance among a variety of types of non-communicating, dynamic agents without assuming they follow any particular behavior rules. It extends our previous work by introducing a strategy using Long Short-Term Memory (LSTM) that enables the algorithm to use observations of an arbitrary number of other agents, instead of a small, fixed number of neighbors. The proposed algorithm is shown to outperform a classical collision avoidance algorithm, another deep RL-based algorithm, and scales with the number of agents better (fewer collisions, shorter time to goal) than our previously published learning-based approach. Analysis of the LSTM provides insights into how observations of nearby agents affect the hidden state and quantifies the performance impact of various agent ordering heuristics. The learned policy generalizes to several applications beyond the training scenarios: formation control (arrangement into letters), an implementation on a fleet of four multirotors, and an implementation on a fully autonomous robotic vehicle capable of traveling at human walking speed among pedestrians.
Socially Aware Motion Planning with Deep Reinforcement Learning
May 04, 2018
For robotic vehicles to navigate safely and efficiently in pedestrian-rich environments, it is important to model subtle human behaviors and navigation rules (e.g., passing on the right). However, while instinctive to humans, socially compliant navigation is still difficult to quantify due to the stochasticity in people's behaviors. Existing works are mostly focused on using feature-matching techniques to describe and imitate human paths, but often do not generalize well since the feature values can vary from person to person, and even run to run. This work notes that while it is challenging to directly specify the details of what to do (precise mechanisms of human navigation), it is straightforward to specify what not to do (violations of social norms). Specifically, using deep reinforcement learning, this work develops a time-efficient navigation policy that respects common social norms. The proposed method is shown to enable fully autonomous navigation of a robotic vehicle moving at human walking speed in an environment with many pedestrians.
Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning
May 04, 2018
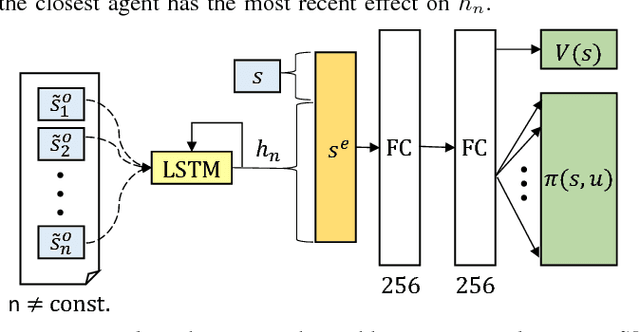
Robots that navigate among pedestrians use collision avoidance algorithms to enable safe and efficient operation. Recent works present deep reinforcement learning as a framework to model the complex interactions and cooperation. However, they are implemented using key assumptions about other agents' behavior that deviate from reality as the number of agents in the environment increases. This work extends our previous approach to develop an algorithm that learns collision avoidance among a variety of types of dynamic agents without assuming they follow any particular behavior rules. This work also introduces a strategy using LSTM that enables the algorithm to use observations of an arbitrary number of other agents, instead of previous methods that have a fixed observation size. The proposed algorithm outperforms our previous approach in simulation as the number of agents increases, and the algorithm is demonstrated on a fully autonomous robotic vehicle traveling at human walking speed, without the use of a 3D Lidar.